 WARNING: This article may be obsolete
WARNING: This article may be obsoleteThis post was published in 2022-08-02. Obviously, expired content is less useful to users if it has already pasted its expiration date.
 This article is categorized as "Garbage" . It should NEVER be appeared in your search engine's results.
This article is categorized as "Garbage" . It should NEVER be appeared in your search engine's results.Table of Contents
从Edge换回Chrome
上一次是从chrome换到edge:🔗 [2021-11-20 - Truxton's blog] https://truxton2blog.com/2021-11-20/
用了半年多以后,又一次从Edge换回了Chrome,主要原因是:
明明是chromium内核的浏览器,edge却死活不肯支持avif格式的图片,令人感到非常失望;
最近Edge打开PDF特别卡,严重影响了使用体验;
有很长一段时间Edge打开bilibili的部分视频会中途卡住,不得不使用Safari播放,现在换到Chrome再试一段时间。
2023年1月:我已经差不多忘记Edge了,今天偶然发现Edge还是不支持avif格式的图片。
今天从哪里开始?Bayesian Filtering
今天从哪里开始?
昨天刚刚完结了bayesian network - introduce,今天不知道该从什么地方继续了()
决定:从这里继续:一篇没有发表的笔记,因为几乎没有任何内容 🔗 [2022-07-24 - Truxton's blog]
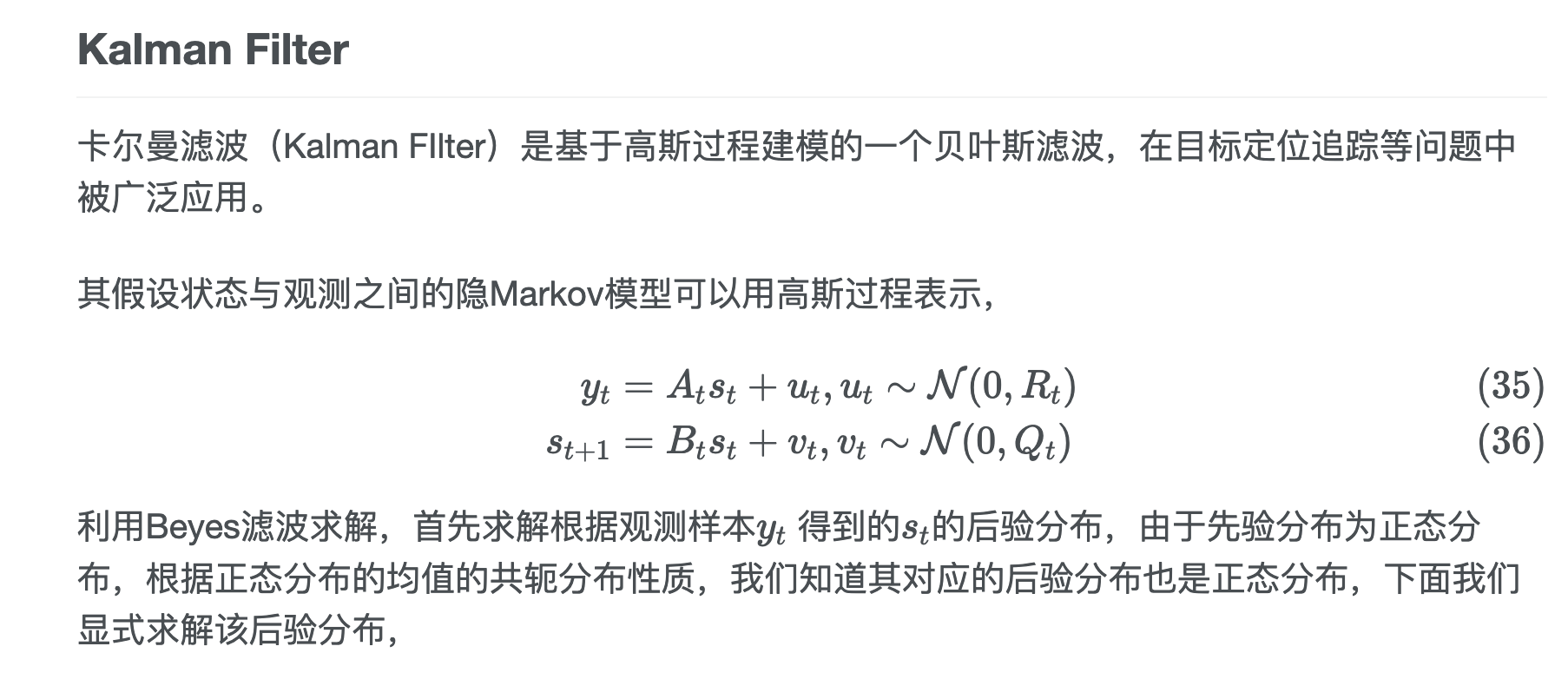
卡尔曼滤波器!
🔗 [卡尔曼滤波与隐马尔可夫模型 - TrueNobility303] https://truenobility303.github.io/Filter/
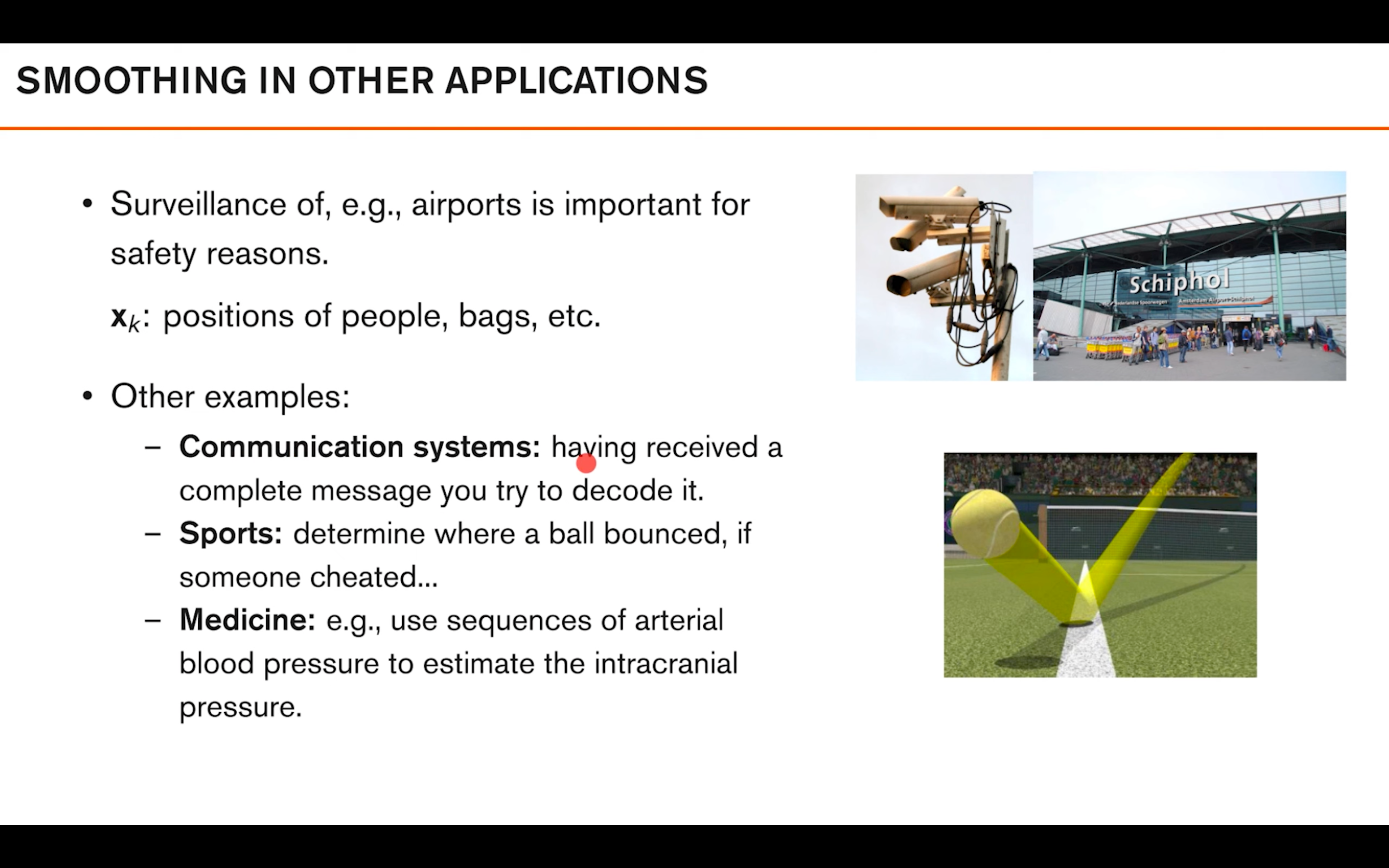
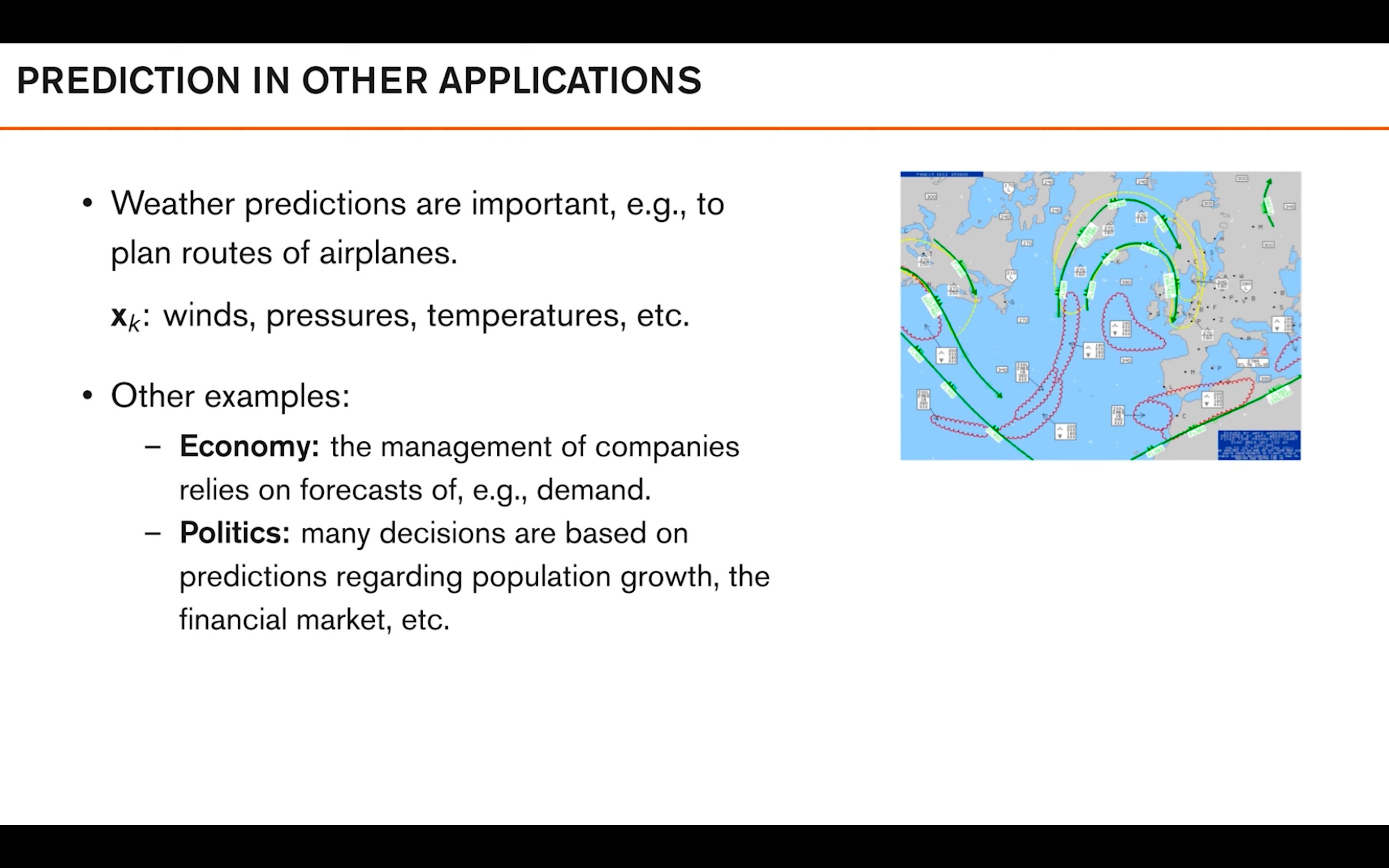
Filtering, smoothing and prediction
滤波,平滑和预测
思路有点散乱,先贴点链接:
preview 🔗 [Lars Hammarstrand - YouTube] https://www.youtube.com/channel/UCI9oKvg_1Q2-JpKGwMp4Peg/videos
🔗 [3.1 Filtering, smoothing and prediction - YouTube] https://www.youtube.com/watch?v=pVyltJnXlAI
* 下面的内容从笔记p=7733整合进来
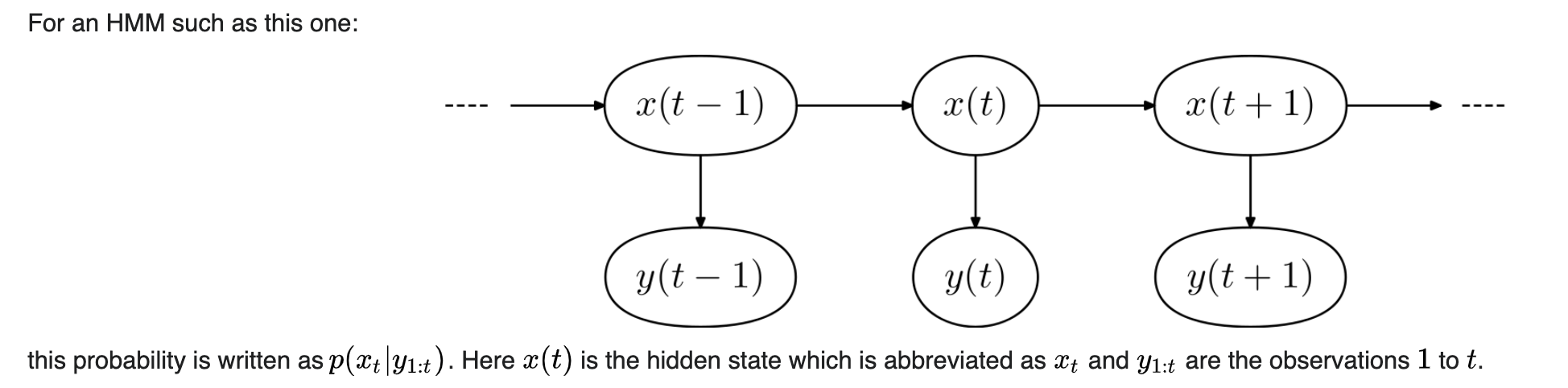
从这里开始:🔗 [卡尔曼滤波与隐马尔可夫模型 - TrueNobility303] https://truenobility303.github.io/Filter/
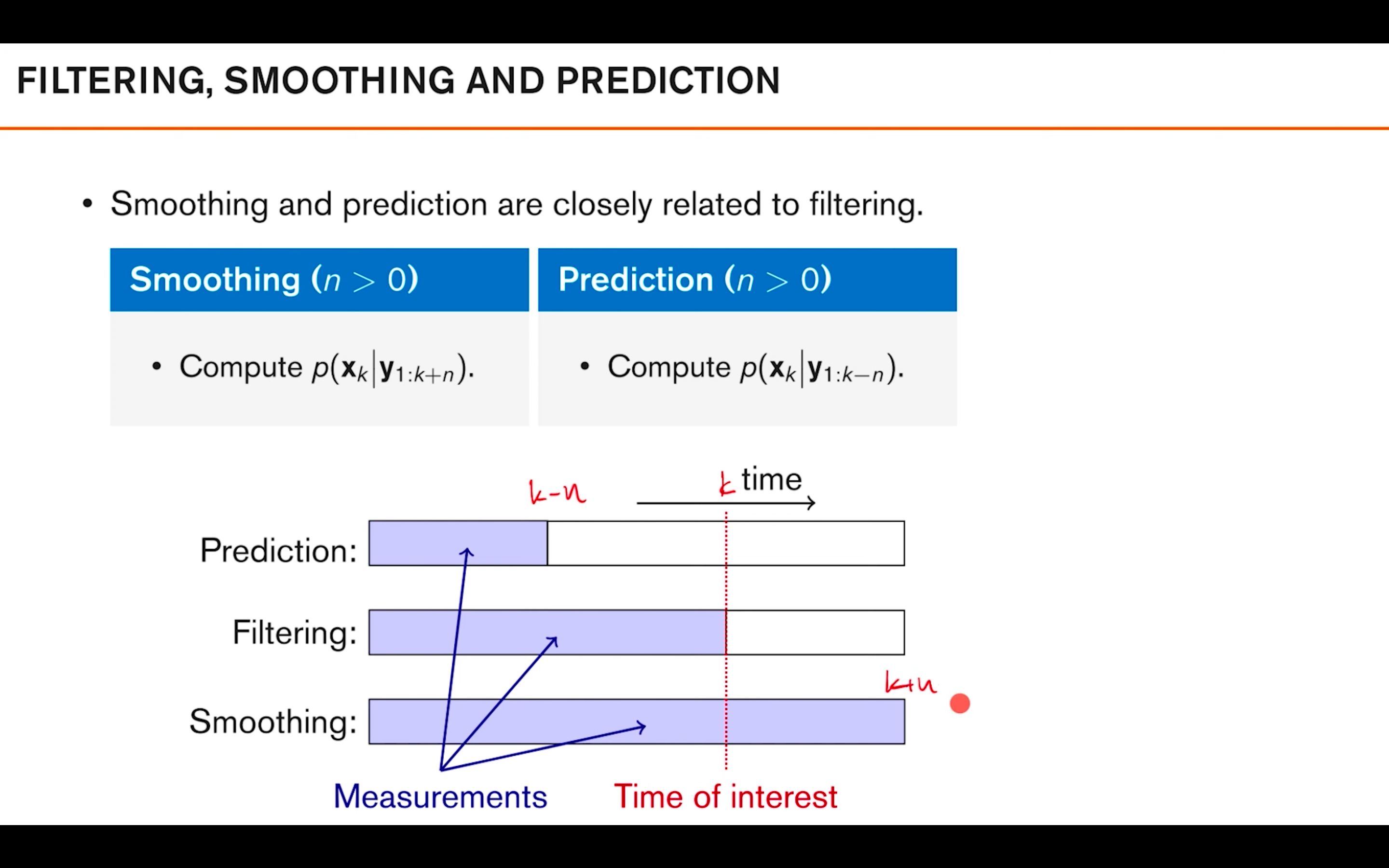
注意下面的图:
虚线标注的「time of interest」只是「我们希望研究的时间点(的状态)」;
紫色条对应的是「已经走过的时间」,很显然,紫色条的最右端为「当前的时刻」。
那么prediction就是「采集所有时序数据,但希望对未来的某个时间点(的状态)进行推测」;
filtering就是「采集所有时序数据,对当前时间(的状态)进行推测」;
smoothing就是「采集所有时序数据,对过去的某个时间点(的状态)进行推测」。
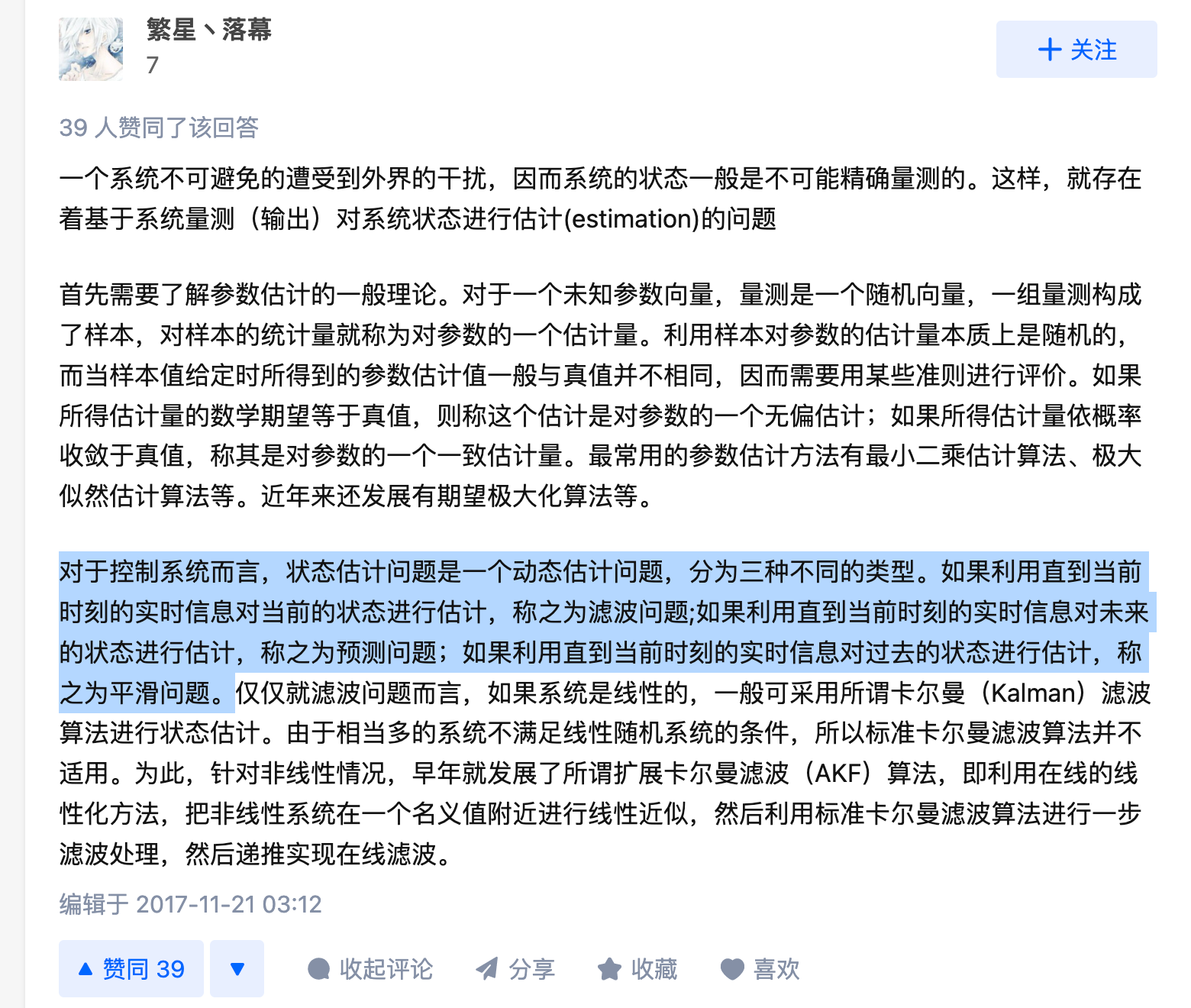
和这个知乎回答的内容要保持逻辑一致。
🔗 [滤波、预测和平滑之间的关系是什么? - 知乎] https://www.zhihu.com/question/24877642
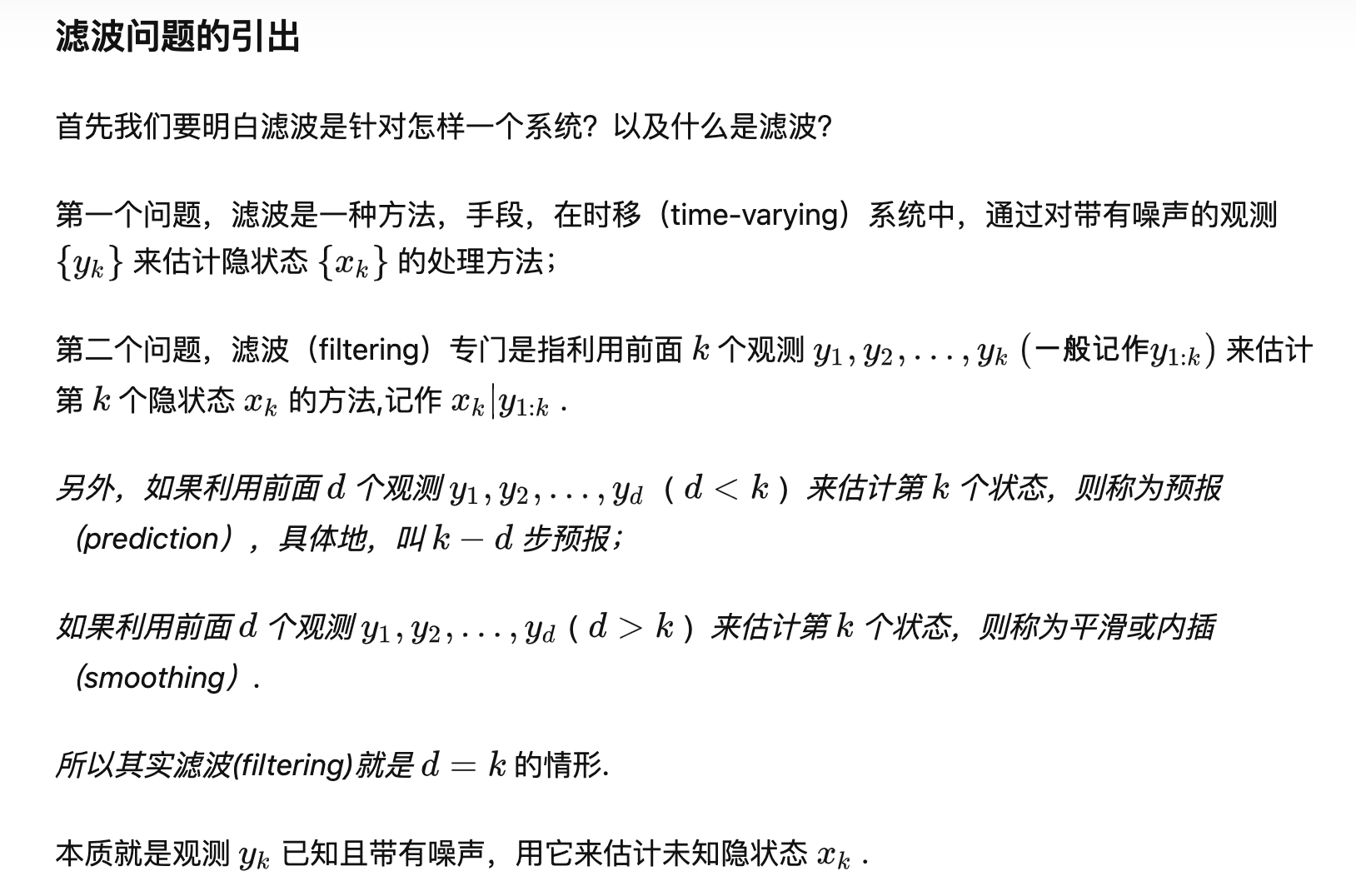
还有一个答案(核心内容是完全一致的,多一个补充)
🔗 [贝叶斯滤波(Bayesian filtering) - 知乎] https://zhuanlan.zhihu.com/p/139215491
和已学过的马尔可夫家族成员的联系
和一些学过的马尔可夫家族成员的联系:
滤波,filtering,利用当前观测到的所有结果推测当前的状态:对应Forward algorithm;
平滑,smoothing,利用当前观测到的所有结果推测过去某一时刻的状态:可以是Forward-backward,也可以是viterbi. 注意单独backward是不行的,因为「要观测所有结果」。
预测,prediction,利用当前观测到的所有结果推测未来某一时刻的状态:看起来还没接触过,但实际上接触过!在bayesian filtering的一个子步骤中,我们首先会对下一刻时间的状态进行先验预测,然后等“下一刻”到来之时,用观测出的结果更新我们的先验预测。红字的部分即为prediction .
写得差不多了,可以回来了,现在开始学习「贝叶斯滤波」
2025-09-25的补充
贝叶斯滤波虽然需要利用当前观测到的所有结果(包含当前+过去),但不需要逐个存储过去每一刻的状态的数据(如果内存吃紧)。如果一个贝叶斯滤波程序是一直向前推进的,那就仅仅需要记住一种数据变量即可:上一步的后验分布[mathjax]p(s_{t-1} | y_{1:t-1})[/mathjax]. 然后每一次t+1的时候更新这个变量。
Parameters of interest / nuisance parameter
parameters of interest / nuisance parameter
🔗 [NARUTOACM-概率统计学相关笔记(八)] http://narutoacm.github.io/2014/09/19/prob-stati-notes8.html
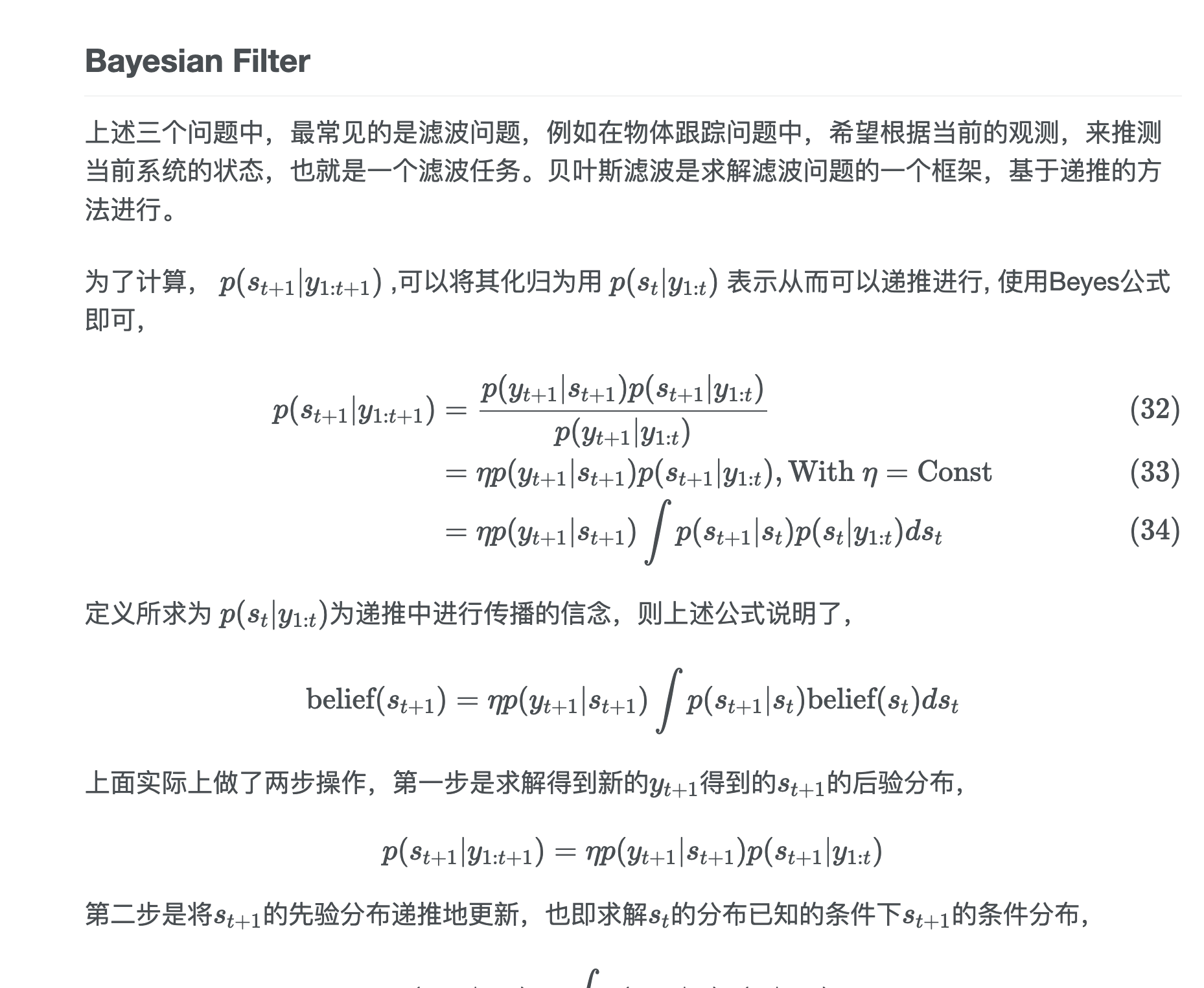
Bayesian filtering
bayesian filtering
* 又称为recursive Bayesian estimation
滤波:采集到目前为止的数据,对当前时刻的状态进行推测。
阅读这部分内容:
但这一步拖了我非常长的时间:

.....
.....
.....
终于,过了很长时间我才差不多搞明白,可以回来继续写笔记了。
标题写成bayesian filtering,但目前看来,要想成功推导原博客里的公式,必须认定这是一个markov chain模型!
查了一下似乎大家都喜欢这么干:
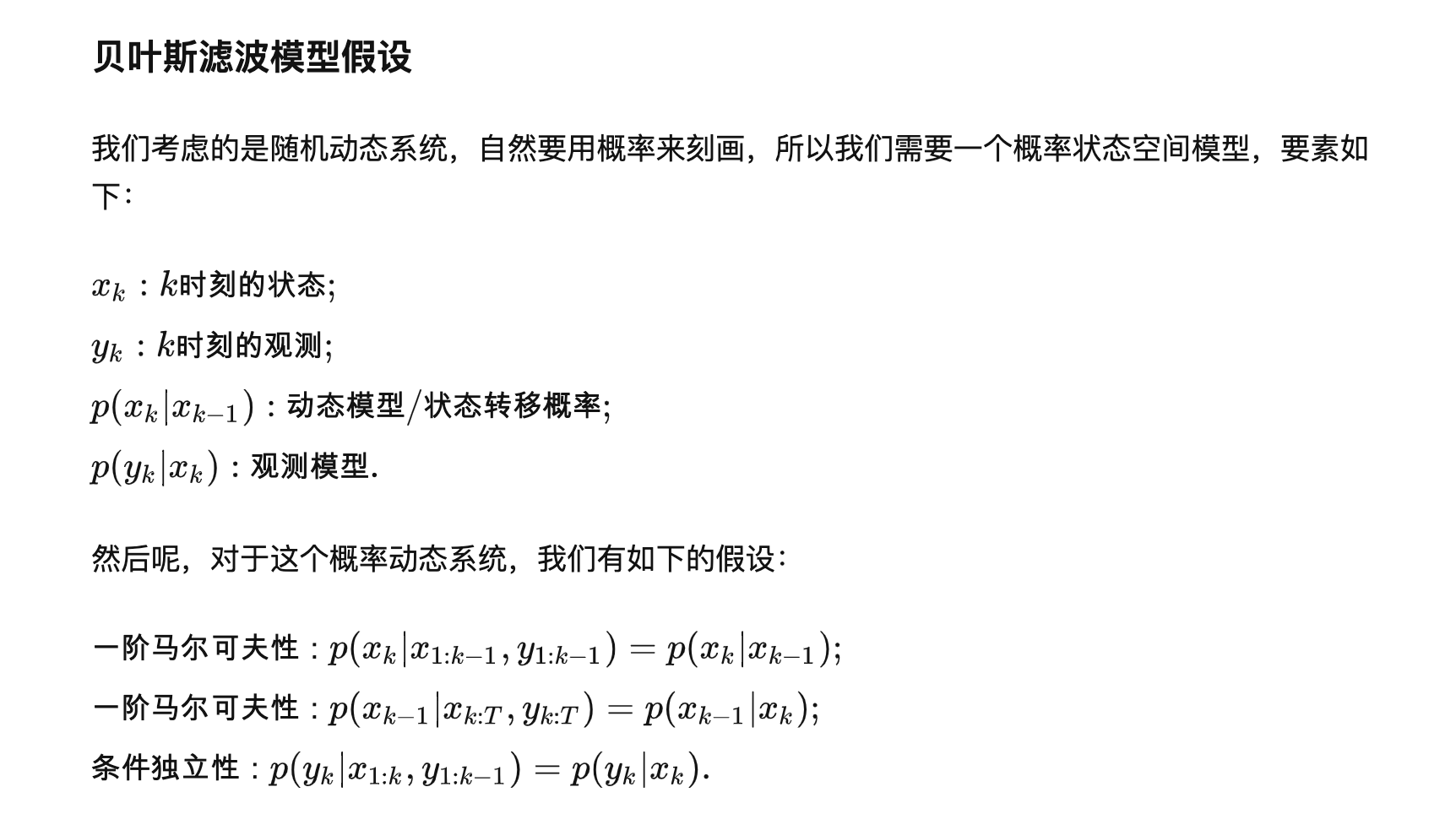
同时,维基百科对bayesian filtering也是这样直接声明为markov process的:
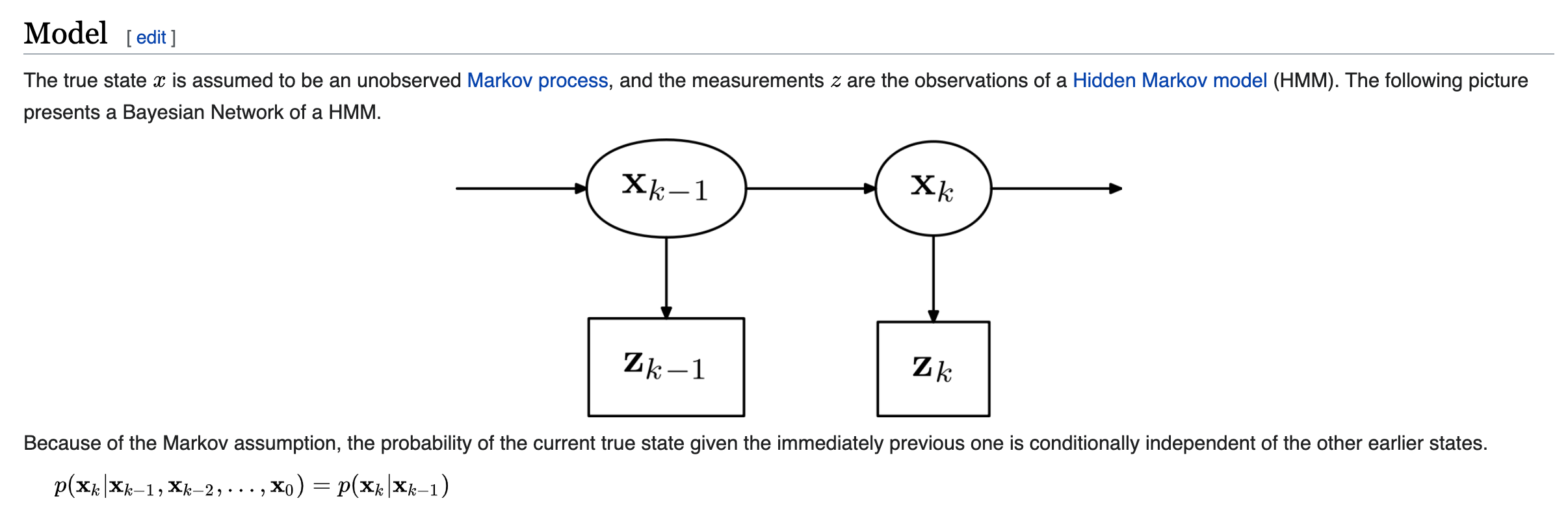
有了Markov chain的额外条件,现在终于可以推导出来了:
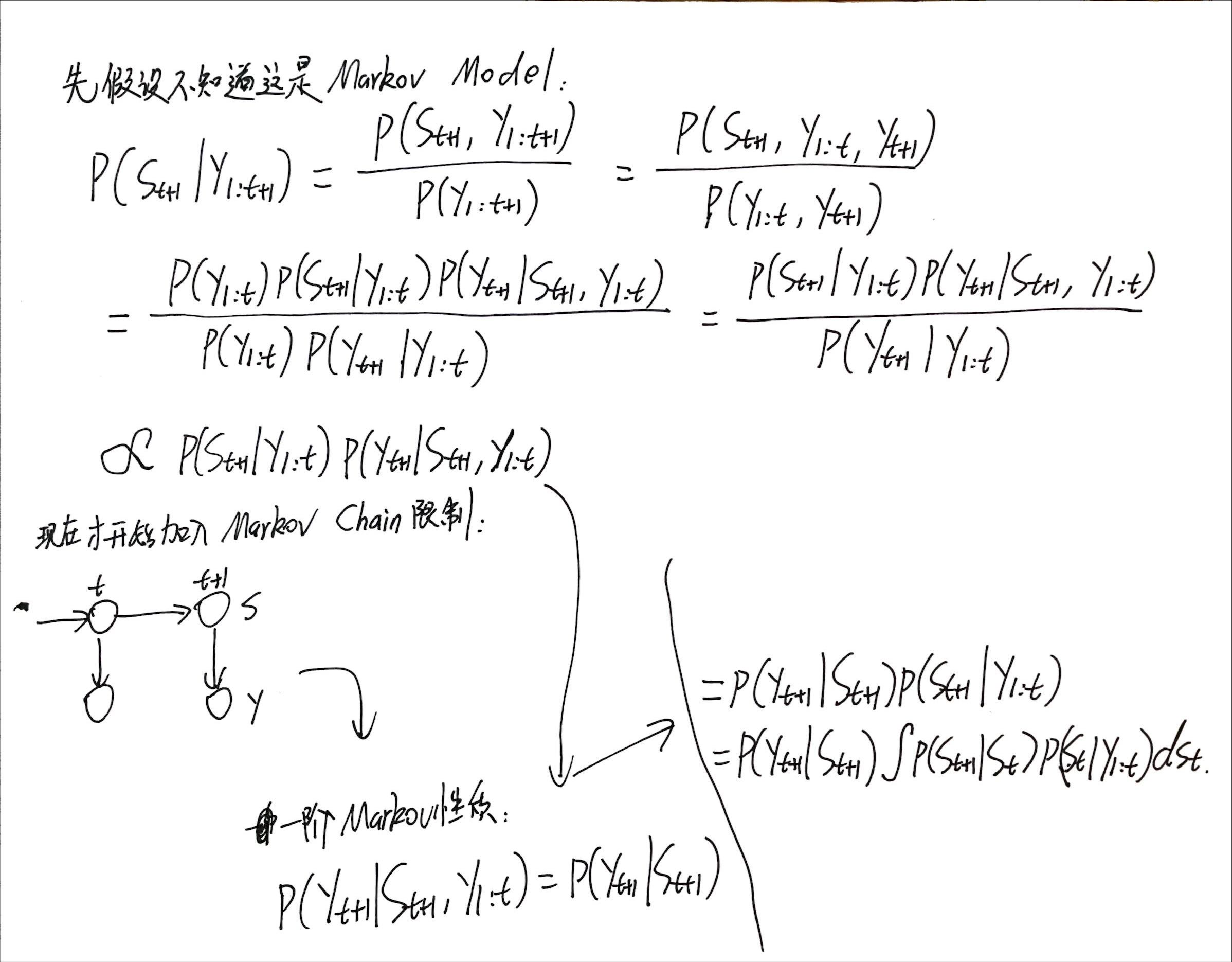
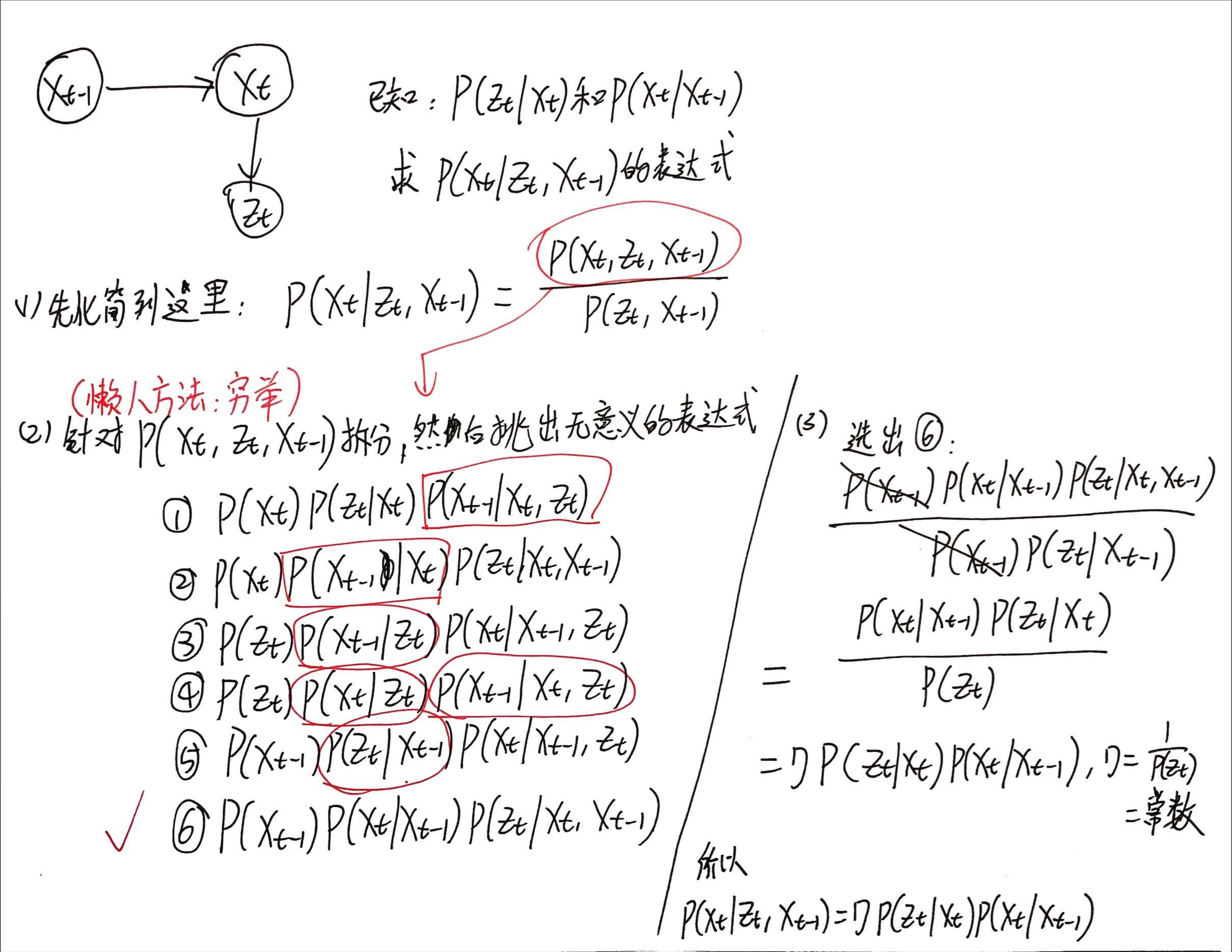
* 上面这个推导过程中有一个“如何正确拆分[mathjax]P(A, B, C)[/mathjax]”的问题,可以参考这张图:
似乎很像...Forward Algorithm!
通过对比2个wikipedia的公式:

所以目前的结论就是:我发现过去的笔记又写错了,很生气,大改了一通:
🔗 [2022-03-20 - Truxton's blog] https://truxton2blog.com/2022-03-20/#笔记1
Bayesian filtering的prior和posterior
首先从最基本的贝叶斯公式开始:
在贝叶斯统计中,一个随机事件或者一个不确定事件的后验概率(Posterior probability)是在考虑和给出相关证据或数据后所得到的条件概率。同样,后验概率分布是一个未知量(视为随机变量)基于试验和调查后得到的概率分布。
https://zh.m.wikipedia.org/zh-hans/后验概率
在收到消息之前有个大致的估计,这是prior -> 又收到了某个消息 -> 更新了相关数据后得到新的概率分布,这是posterior
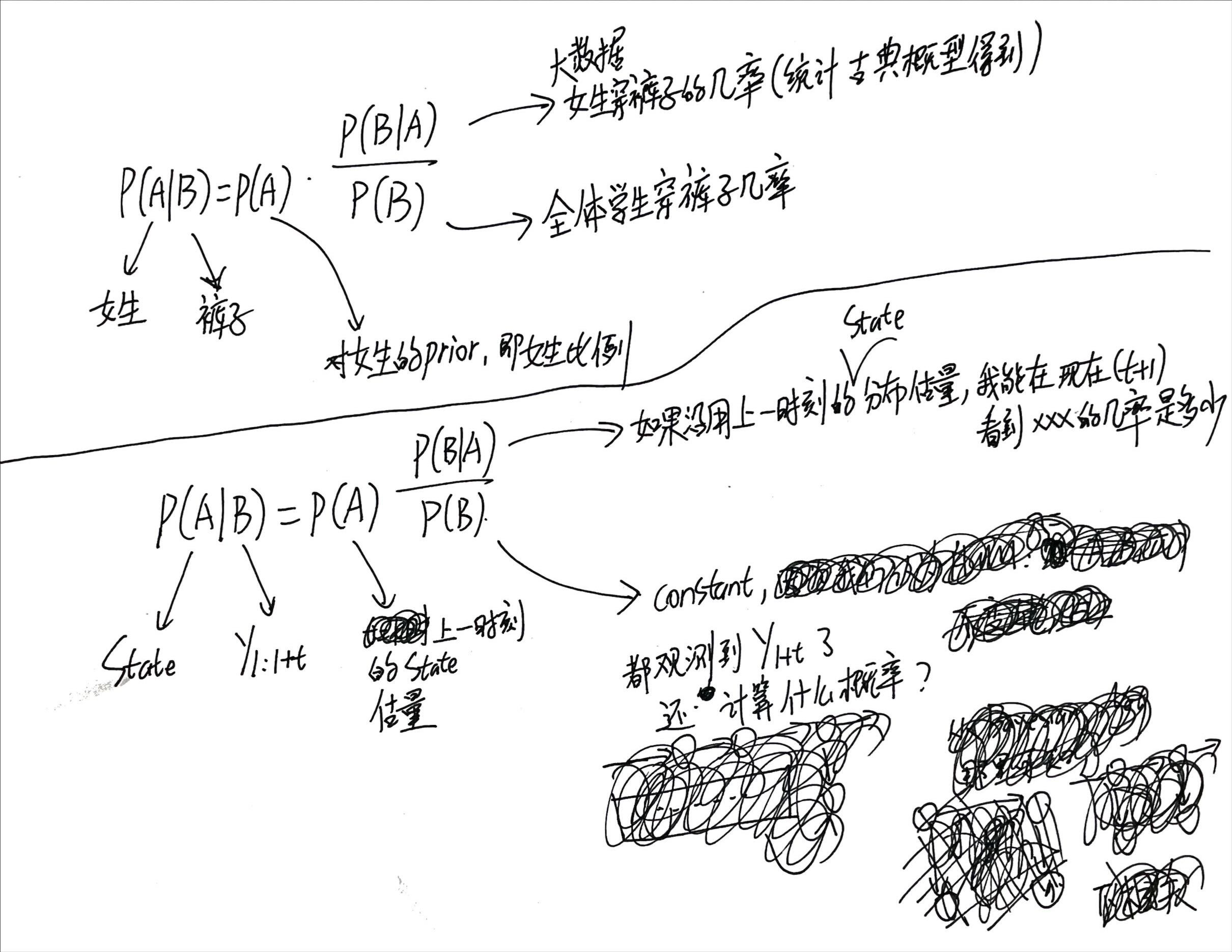
然后考虑刚刚学过的bayesian filtering:
prior -> 又观测到了新东西 -> 更新了对当前状态的估计,这是posterior
还是准备从最经常使用的一个例子开始:
然后推导到本篇笔记所学习的bayesian filtering:
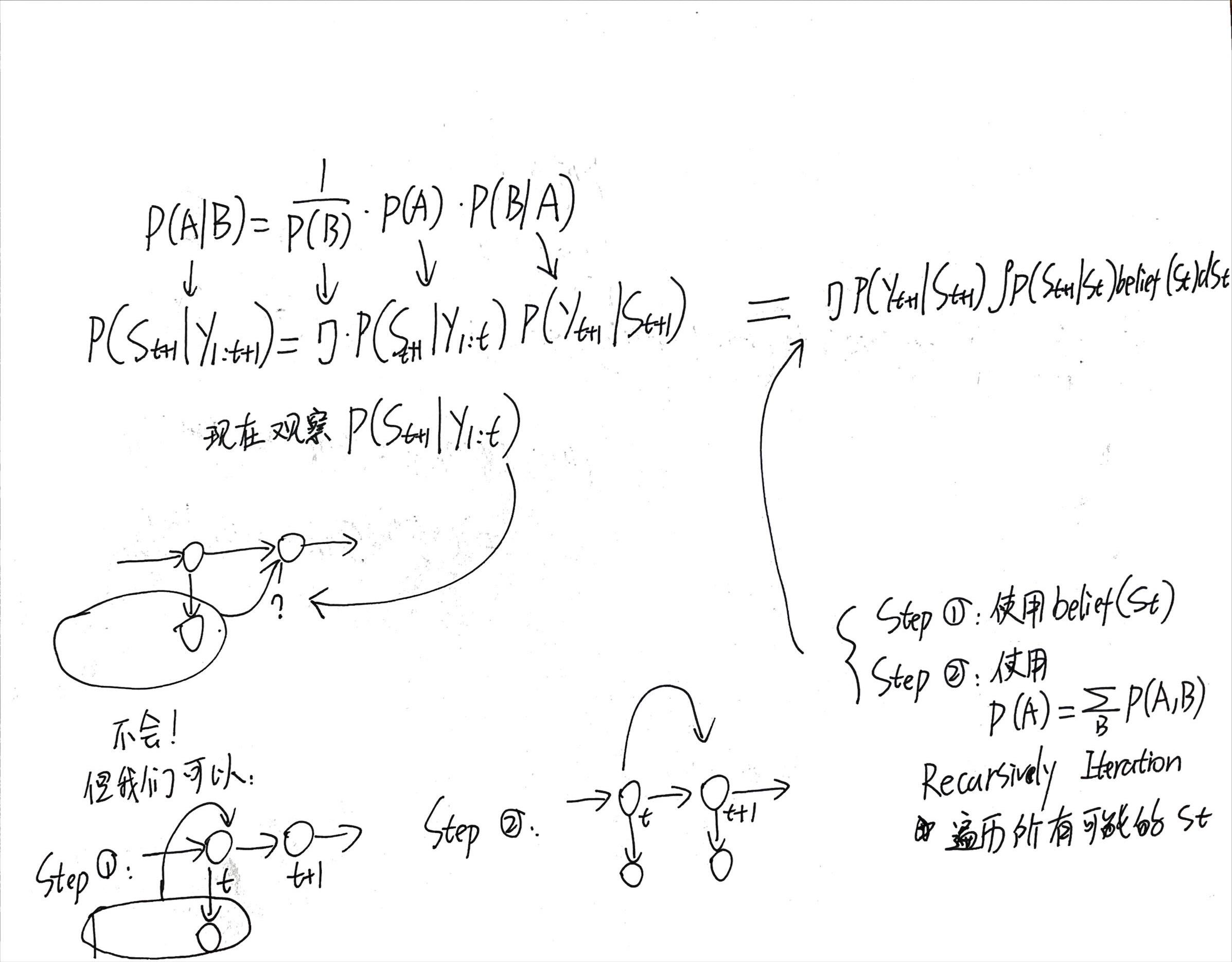
最后总结bayesian filtering的prior、posterior迭代顺序:
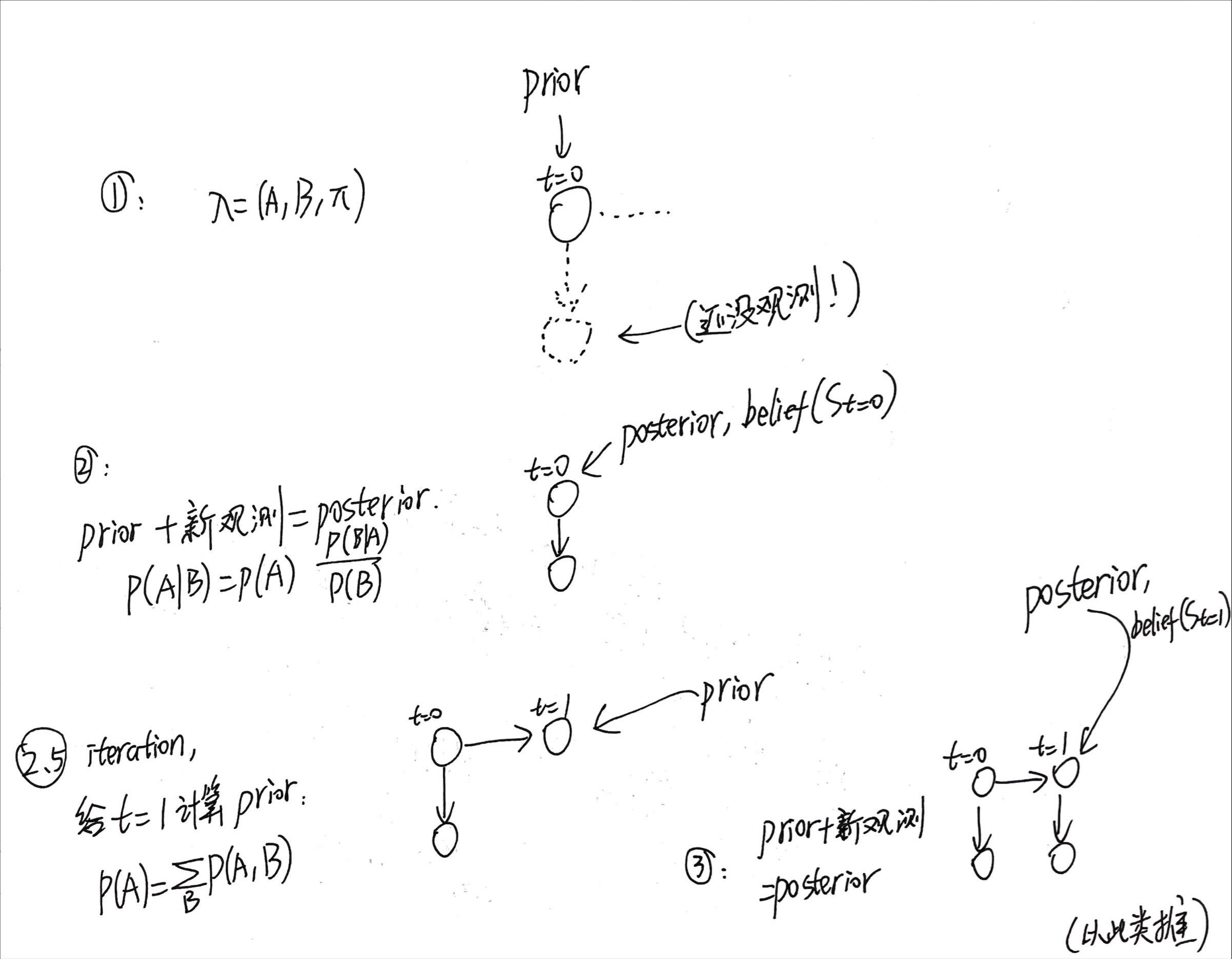
总之,就是一个不断循环的过程:先做prediction(使用先验prior),然后根据实际观测值修正模型(使用后验posterior),然后继续移动到下一个时间点...
(补充)Bayesian Filtering到kalman filter过渡的关键公式
2022-08-11补充内容
🔗 [【易懂教程】我是如何十分钟理解与推导贝叶斯滤波(Bayes Filter)算法? - 知乎] https://zhuanlan.zhihu.com/p/75880143
[mathjax-d]P\left(x_{t} \mid z_{t}, u_{t}, x_{t-1}\right)=\eta P\left(z_{t} \mid x_{t}\right) P\left(x_{t} \mid u_{t}, x_{t-1}\right)[/mathjax-d]对比不含[mathjax]u[/mathjax]的公式(推导在后面):
[mathjax-d]P\left(X_{t} \mid Z_{t}, X_{t-1}\right)=\eta\ P\left(Z_{t} \mid X_{t}\right) P\left(X_{t} \mid X_{t-1}\right)[/mathjax-d]这个公式就是bayesian filtering和kalman filter的核心部分。
注意到多增加了一个变量:[mathjax]u[/mathjax],它是「从t-1到t所进行的动作」。
总之现在多了一些东西,但总体推导方式还是不变的,具体内容:
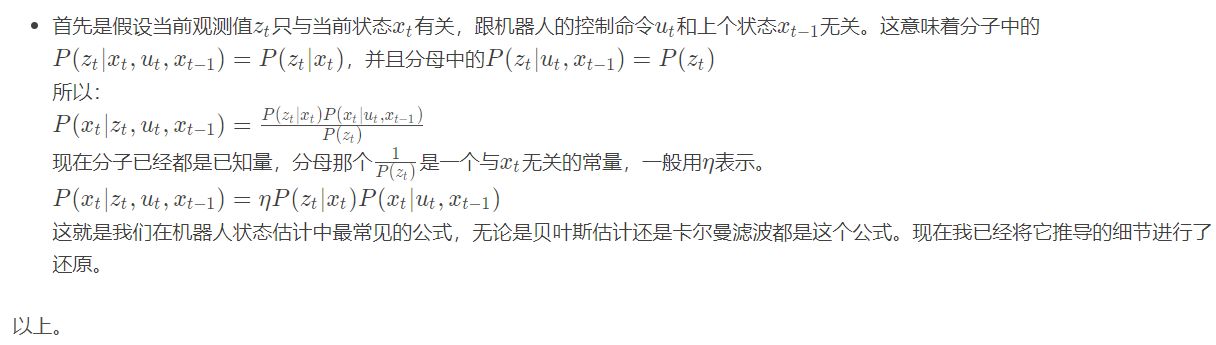
另外,如果要推导不含[mathjax]u[/mathjax]的公式也可以利用相似的方法(在本篇笔记之前应该推导过了,但还是再推导一次):
试图过渡到Kalman,但没有完成
* 试图在一天之内从bayesian filtering过渡到kalman filter,但发现根本学不会,只能另开一篇笔记慢慢学了。下面记录了一些学习过程:
接下来是kalman filtering

以及:
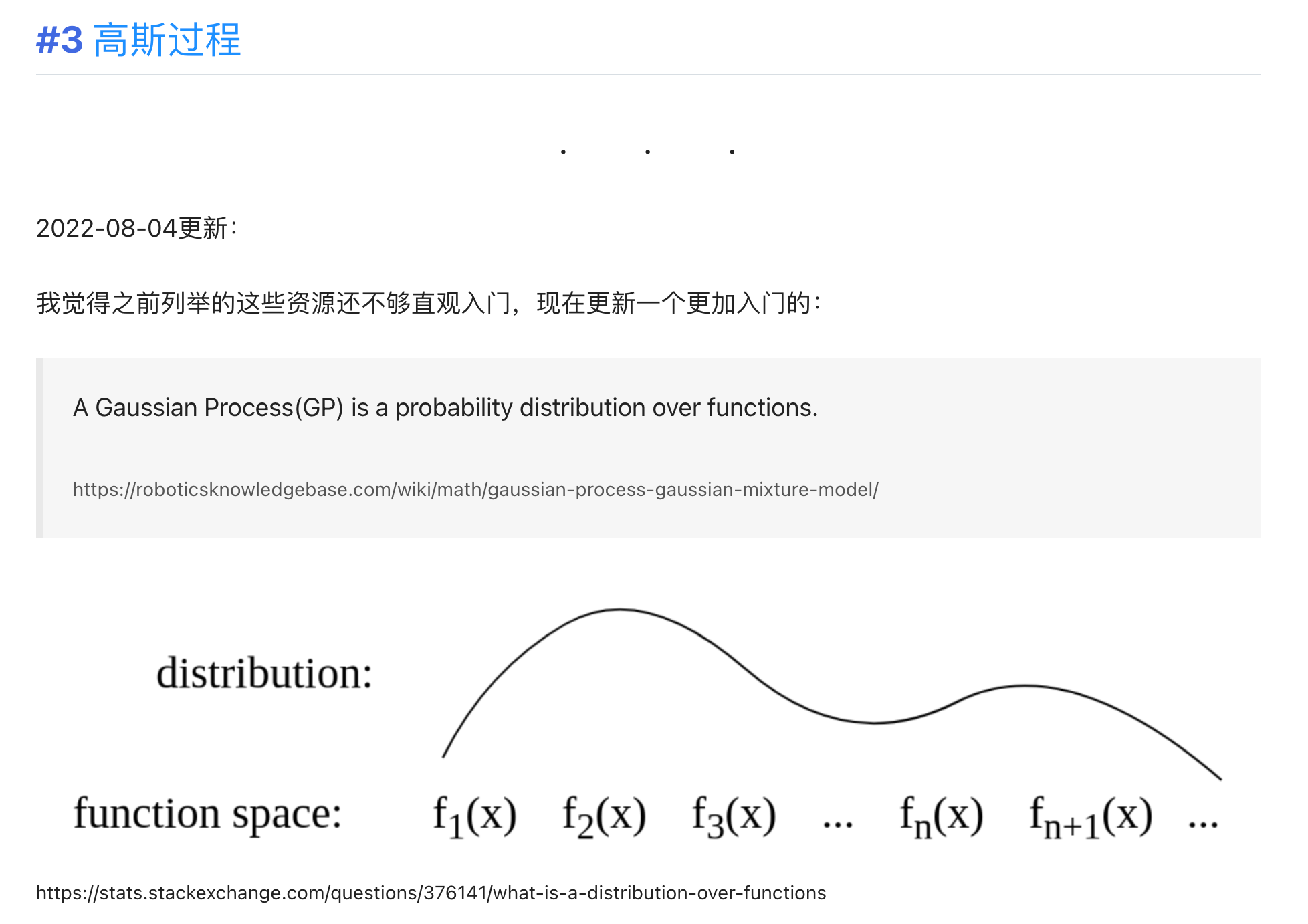
稍微复习一下高斯过程:🔗 [2021-11-18 - Truxton's blog] https://truxton2blog.com/2021-11-18/#高斯过程
* 下面的内容好像有点问题,先划掉
今天的笔记暂时不推导kalman filter了,但一定要记住一点:
kalman filter的 Gaussian 表现在“预测状态的概率分布是Gaussian”,而不是GMM模型里的“发射概率是Gaussian mixture model“.
preview 从这里开始看:🔗 [Kalman filter - Wikipedia] https://en.wikipedia.org/wiki/Kalman_filter#Relationship_to_recursive_Bayesian_estimation
🔗 [4.2 Bayesian derivation of the Kalman filter - YouTube] https://www.youtube.com/watch?v=u_xRUxwlaFY
好久没看GP了,复习起来非常头大。
给2021-11-18更新了一些笔记,现在看起来更容易入门了:
现在还是搞不懂的一个问题就是:kalman filter有哪些变量是Gaussian?有没有可能包含GMM?
