 WARNING: This article may be obsolete
WARNING: This article may be obsoleteThis post was published in 2022-08-10. Obviously, expired content is less useful to users if it has already pasted its expiration date.
 This article is categorized as "Garbage" . It should NEVER be appeared in your search engine's results.
This article is categorized as "Garbage" . It should NEVER be appeared in your search engine's results.Table of Contents
本篇笔记的主要内容
本篇笔记的主要内容是:
令人绝望(且最终放弃了的)kalman filter标准公式的推导;
从另一个角度简单理解kalman filter和bayesian filtering.
Geometric Series, Geometric Distributions (等比级数 / 几何级数)
Geometric Series, Geometric Distributions (等比级数 / 几何级数)
最开始在这里看到的:🔗 [论文阅读:《Real-Time Audio-to-Score Alignment of Music Performances Containing Errors and Arbitrary Repeats and Skips》 - Truxton's blog] https://truxton2blog.com/paper_reading_real_time_audio-to-score_alignment_of_music_performances_containing_errors_and_arbitrary_repeats_and_skips/
通过做这道例题判断自己是否遗忘了这方面的知识!
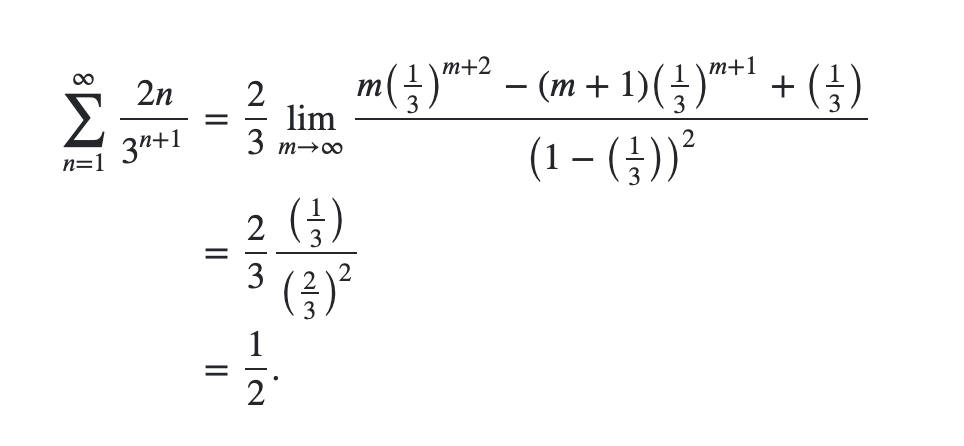
求
[mathjax-d]\sum_{n=1}^{\infty} \frac{2 n}{3^{n+1}}[/mathjax-d]
答案
[mathjax]\frac{1}{2}[/mathjax],见:https://math.stackexchange.com/questions/30732/how-can-i-evaluate-sum-n-0-inftyn1xn
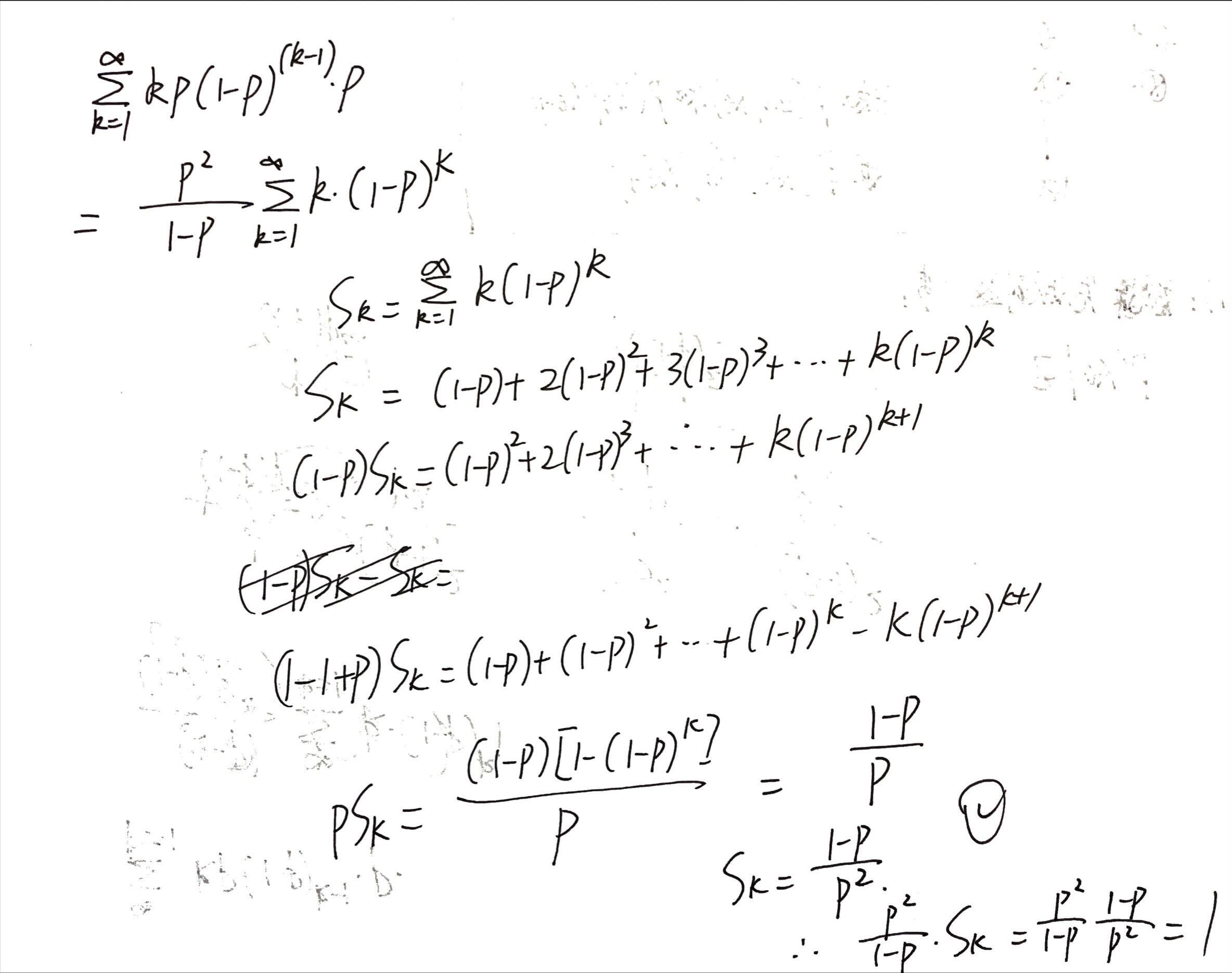
再做一道题:求:
[mathjax-d]\sum_{k=1}^{\infty} k p(1-p)^{(k-1)} p[/mathjax-d]
答案
答案就是[mathjax]1[/mathjax]
过程:
其他参考资料:
🔗 [probability - Why does $\sum_{k=1}^{\infty} kp (1-p)^{(k-1)} p$ converge to 1 for all probabilities p? - Mathematics Stack Exchange] https://math.stackexchange.com/questions/3681183/why-does-sum-k-1-infty-kp-1-pk-1-p-converge-to-1-for-all-probabil
更加一般化的公式推导:preview 🔗 [sequences and series - How can I evaluate $\sum_{n=0}^\infty(n+1)x^n$? - Mathematics Stack Exchange] https://math.stackexchange.com/questions/30732/how-can-i-evaluate-sum-n-0-inftyn1xn
其他常见公式总结:preview 🔗 [series.pdf] https://people.math.osu.edu/husen.1/teaching/530/series.pdf
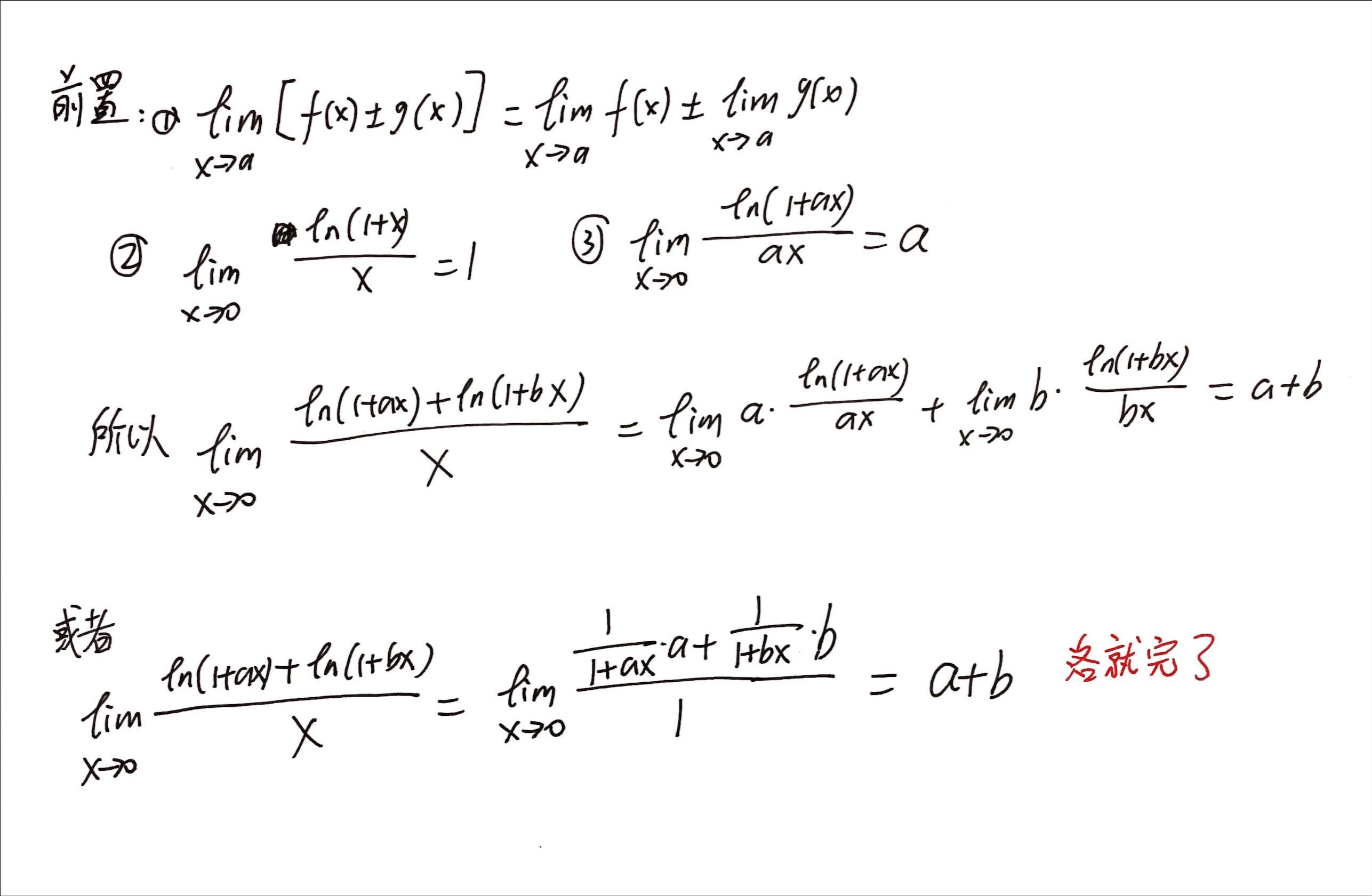
微积分Lim x->0 [log(1+ax)+log(1+bx)]/x
微积分Lim x->0 [log(1+ax)+log(1+bx)]/x
🔗 [Lim x->0 [log(1+ax)+log(1+bx)]/x =? | Socratic] https://socratic.org/questions/lt-x-0-log-1-ax-log-1-bx-x
(几乎没有学进去)继续在kalmanfilter.net上面学习kalman filter
继续在kalmanfilter.net上面学习kalman filter
今天从这里开始:🔗 [State Extrapolation Equation] https://www.kalmanfilter.net/stateextrap.html
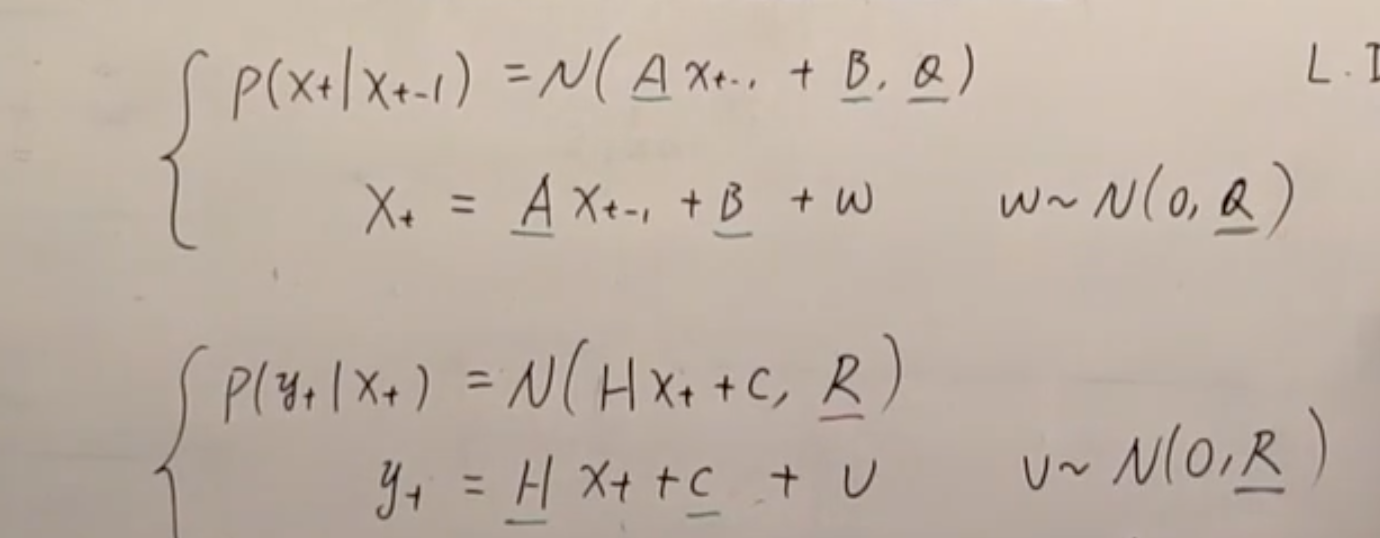
要学习STATE EXTRAPOLATION EQUATION,也就是这张图的这个方程:

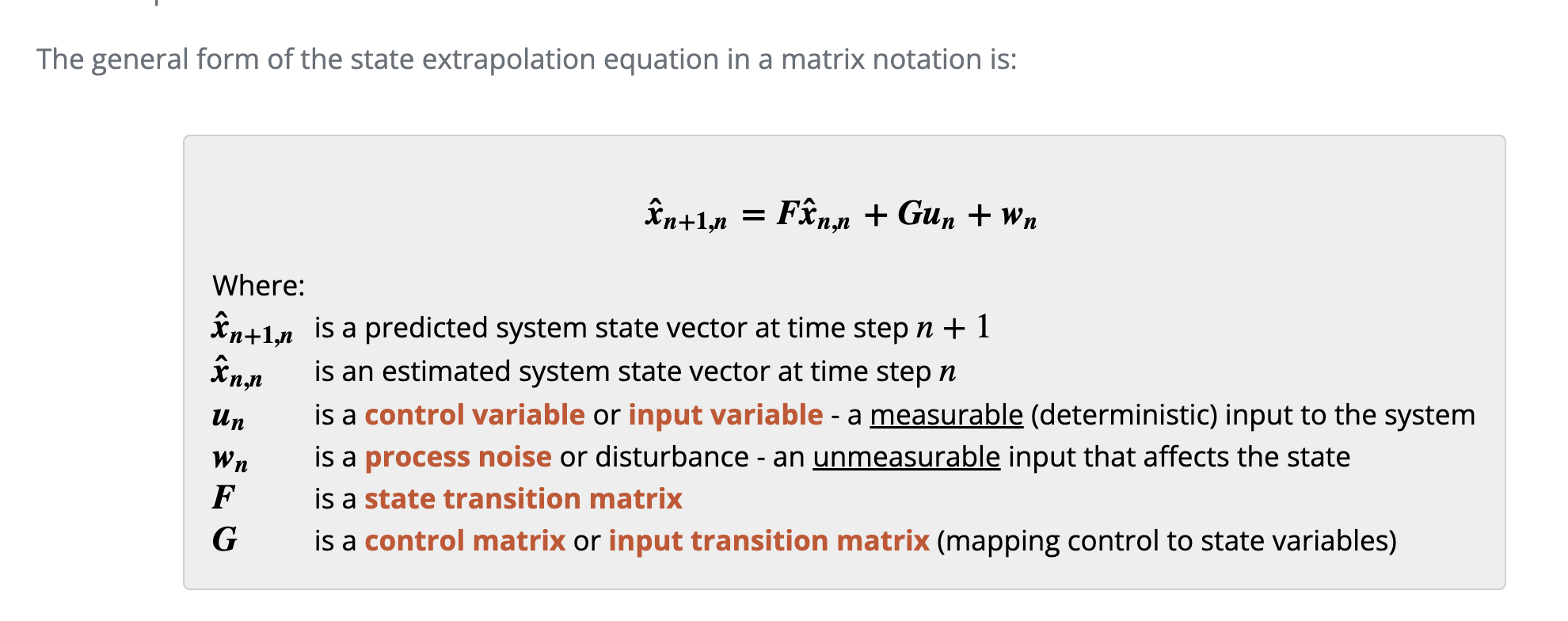
有点眼熟,是不是和这个差不多?(对应的笔记)
这部分的内容看起来很多,但本质上还是没有引入新的公式,毕竟这是「和物理相关的内容」:
匀加速运动,预测下一时间的位置、速度、加速度。其中加速度保持不变。本质上就是把多个公式融合成了矩阵乘法。

在这个页面的末尾出现了一个新的概念需要学习:Linear Time-Invariant(LTI)(线性时不变)系统。
A time-invariant system is one where a time delay (or shift) in the input sequence causes an equivalent time delay in the system's output sequence.
https://www.kalmanfilter.net/stateextrap.html
接下来看下一章:🔗 [Modeling linear dynamic system] https://www.kalmanfilter.net/modeling.html
先跳过
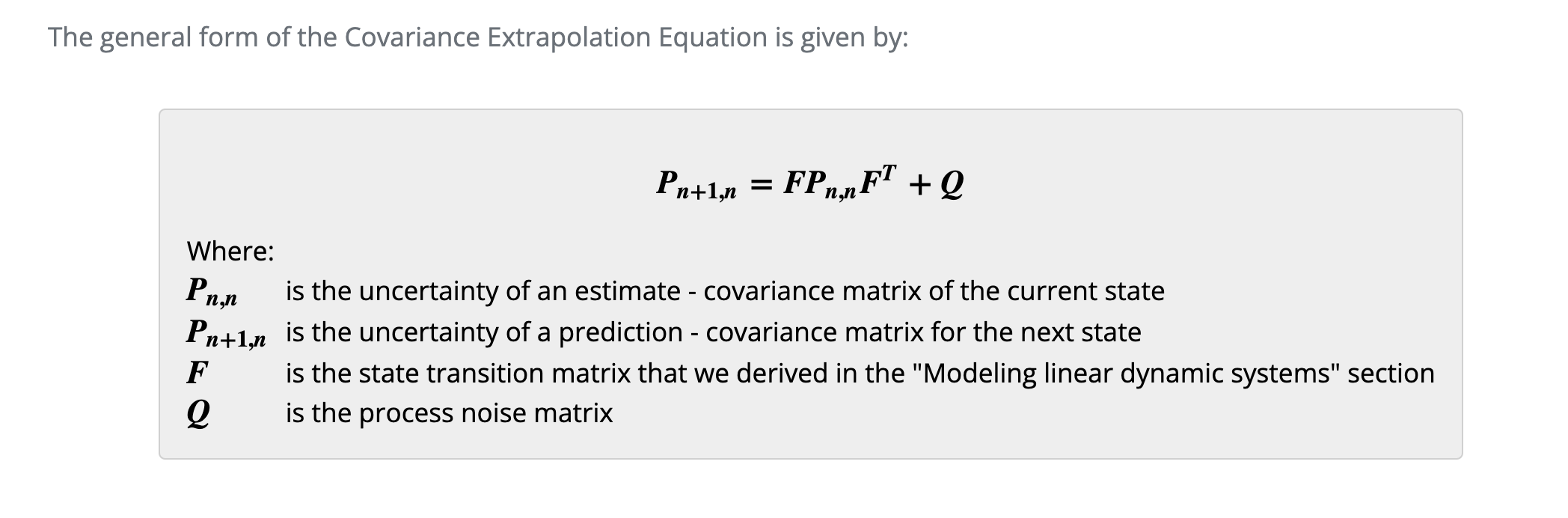
接下来看下一章:🔗 [Covariance Extrapolation Equation] https://www.kalmanfilter.net/covextrap.html
对比2022-08-07学的入门公式和现在的公式:
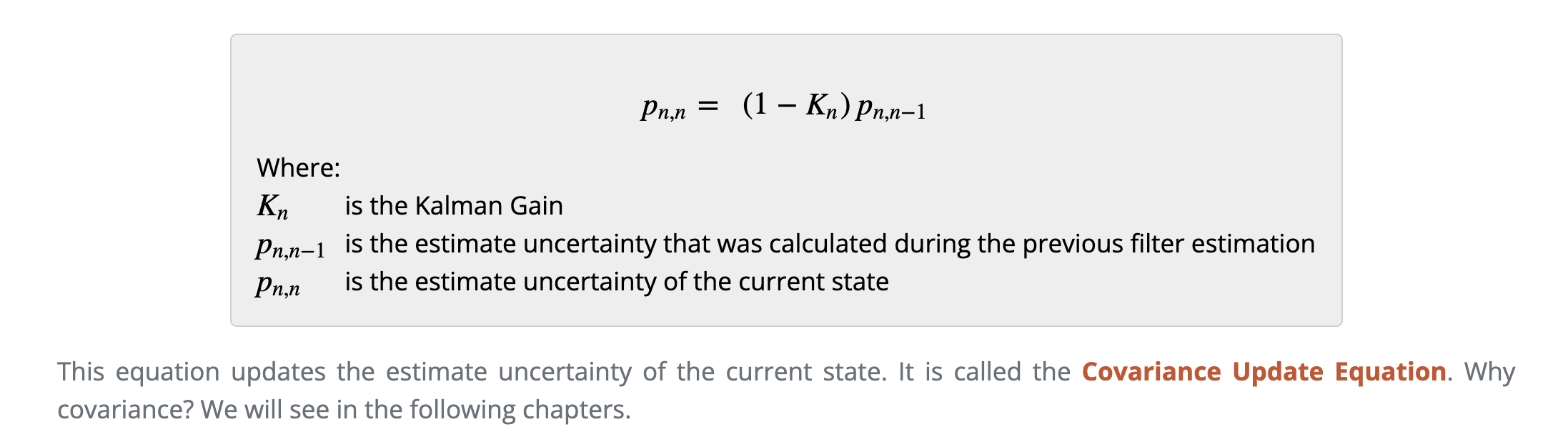
等一下!注意到这句话:
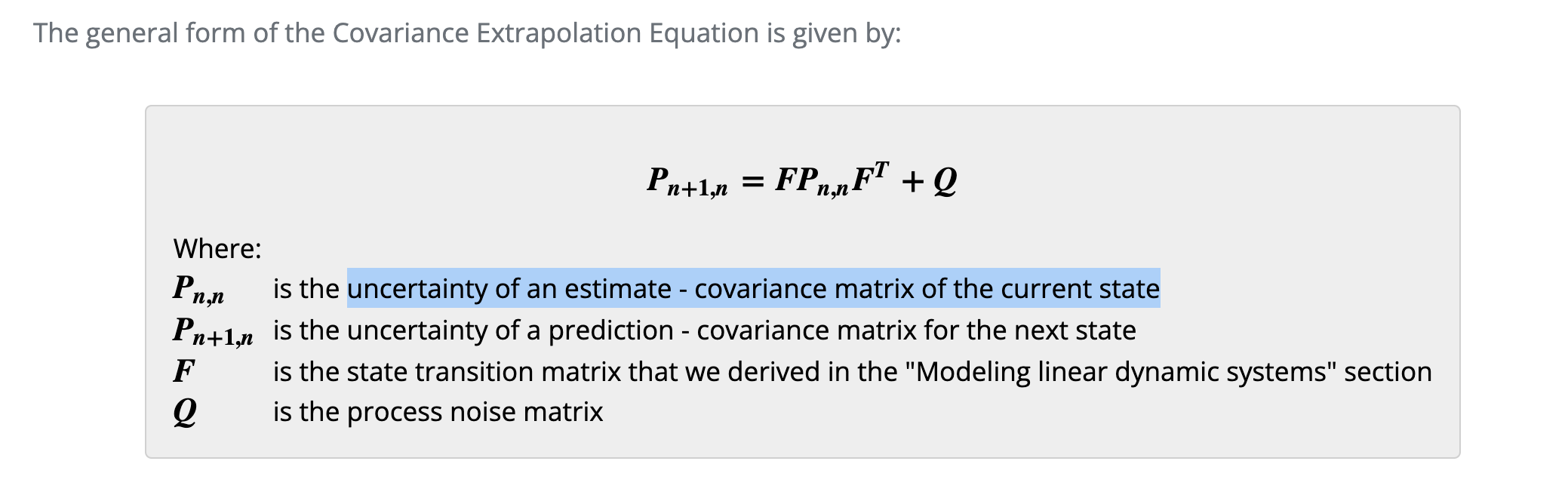
covariance matrix和uncertainty有什么关系呢?
🔗 [不确定度与协方差矩阵的关系_linxigjs的博客-CSDN博客] https://blog.csdn.net/linxigjs/article/details/93064354
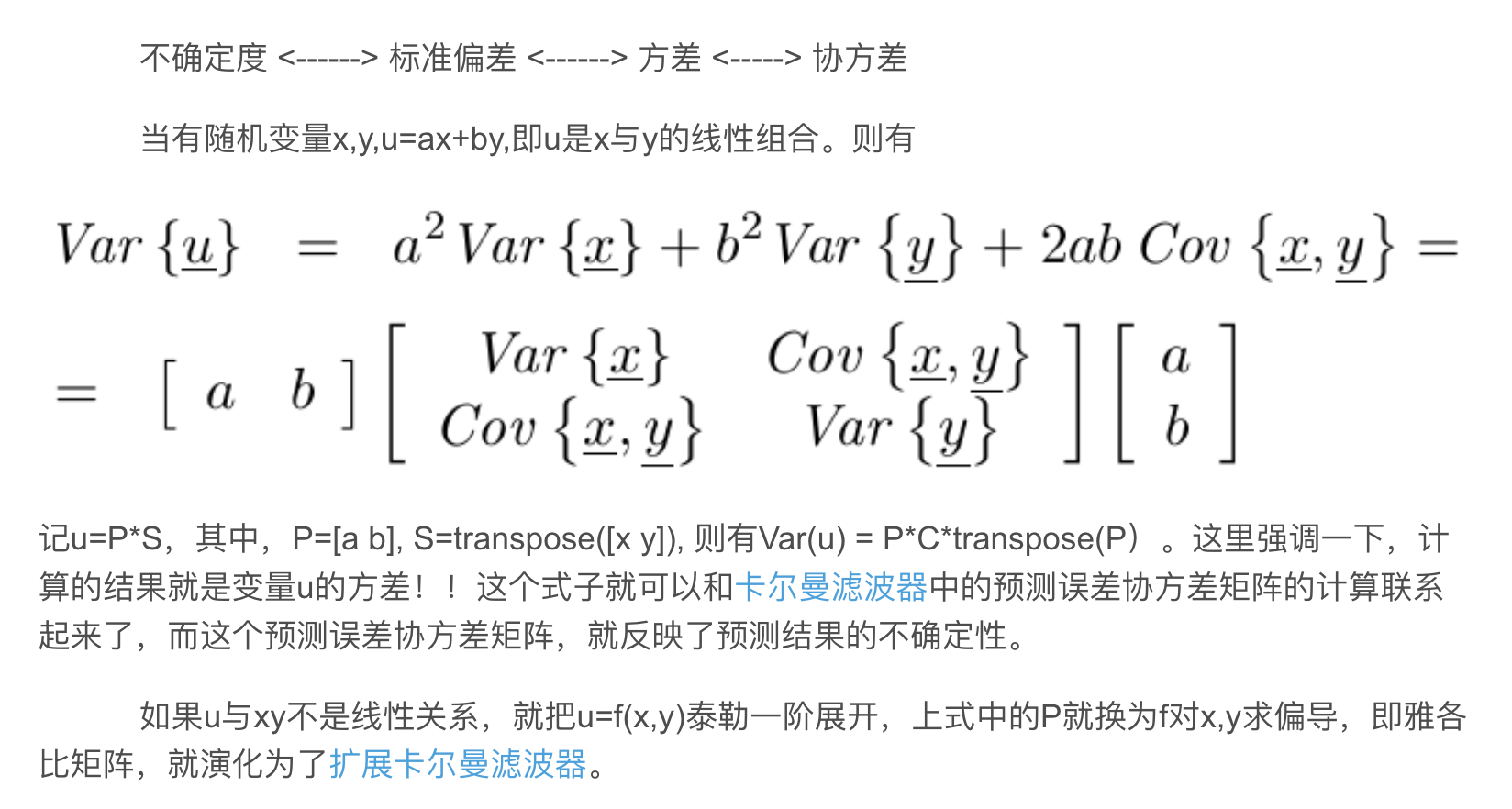
等等,上面两张图(分别来自CSDN和kalmanfilter.net)的公式是不是有点像?先继续学下去,后续再总结规律。
对这部分证明有所疑惑,但还是先跳过了:
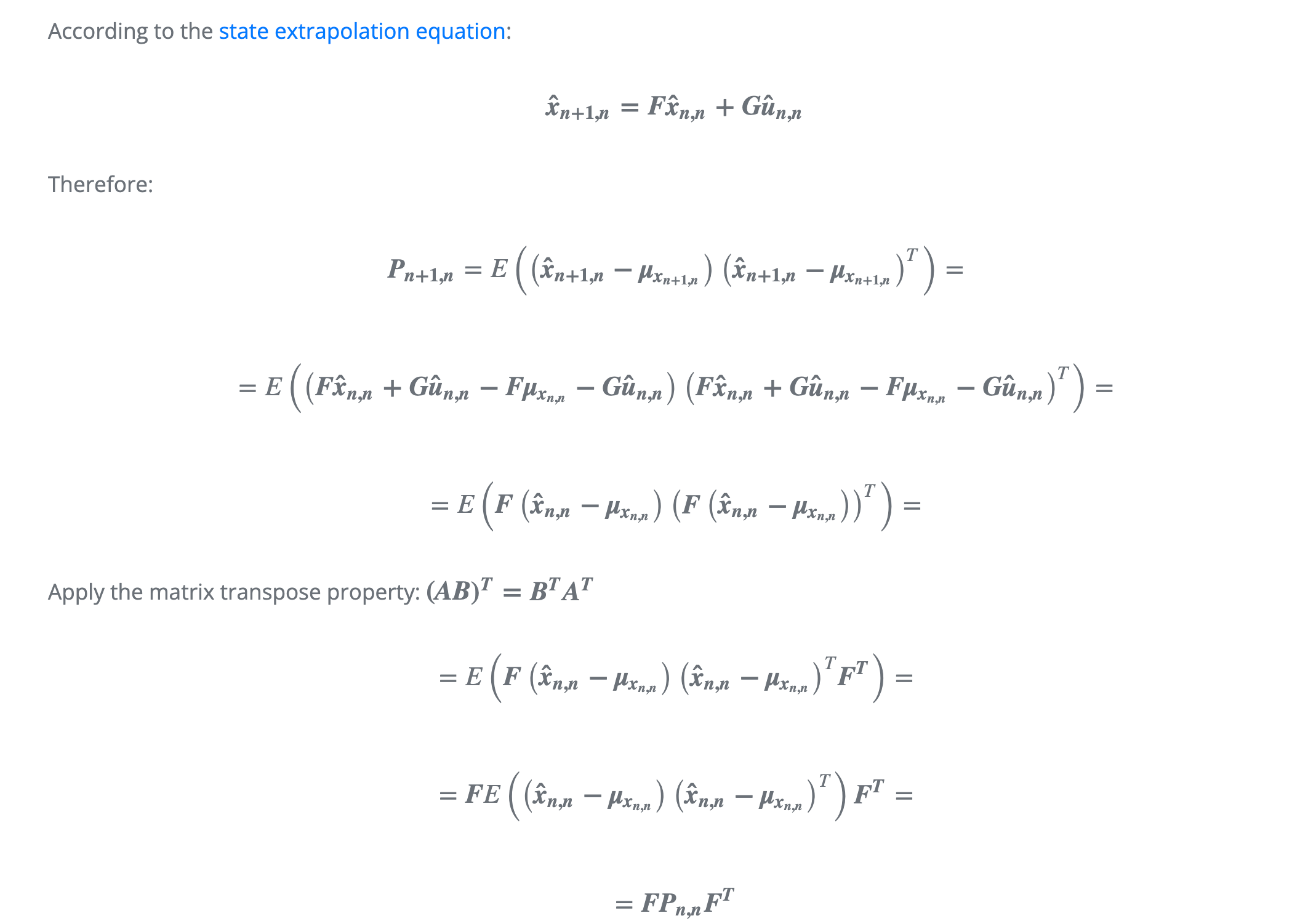
.....
看不下去,跳过了很多章节
再次总结kalman filter的5个基本公式
先看看这个能不能看懂:🔗 [Summary] https://www.kalmanfilter.net/multiSummary.html
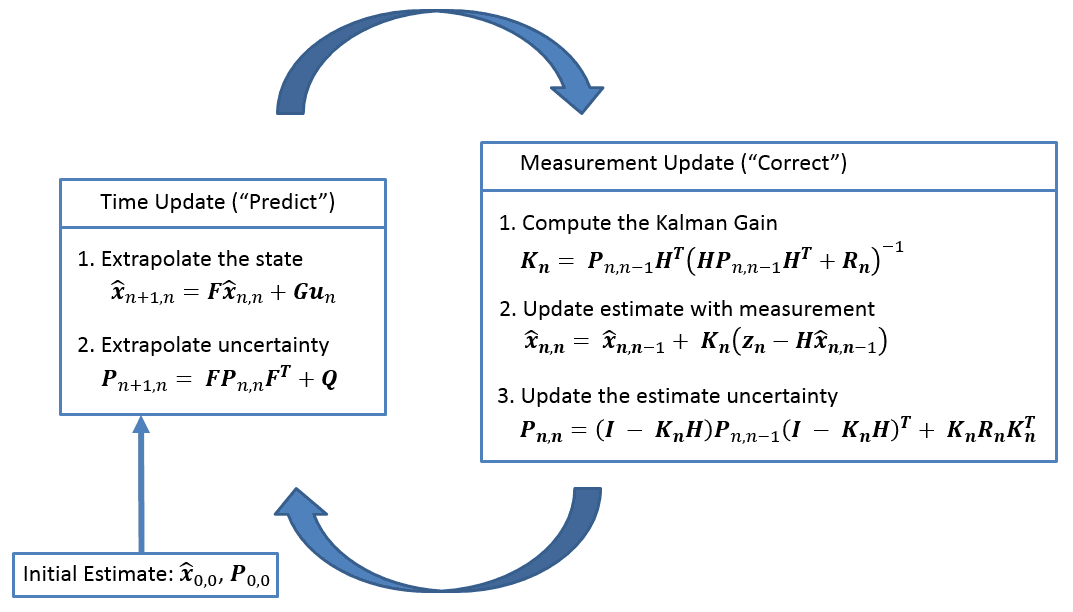
这张流程图的大致思路当然可以看懂,因为沿用了之前学习的[mathjax]\alpha-\beta-(\gamma)[/mathjax]滤波器的思路。
已知的3个学习资料(kalmanfilter.net, B站徐亦达,https://truenobility303.github.io/Filter/)都遇到了麻烦!
从另一个角度简单理解kalman filter
看一下这个:如何通俗并尽可能详细地解释卡尔曼滤波? - 司南牧(李韬)的回答 - 知乎 https://www.zhihu.com/question/23971601/answer/770830003
对红圈里的文字产生了一点疑惑:
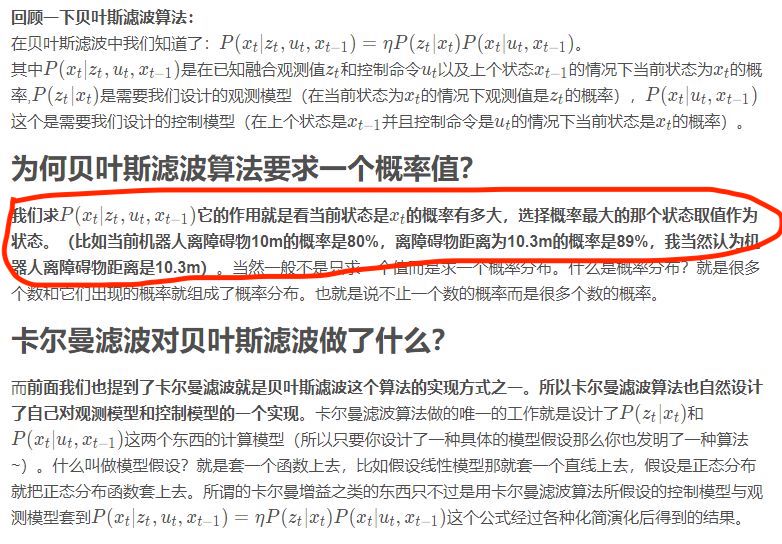
后来想明白了(蓝色高亮文字):

使用forward algorithm的目的是「把求得的数值拿来用」,当然需要对当前状态进行判定。最简单的方法当然就是「当前时刻哪个状态概率最大就判定为哪个状态」。
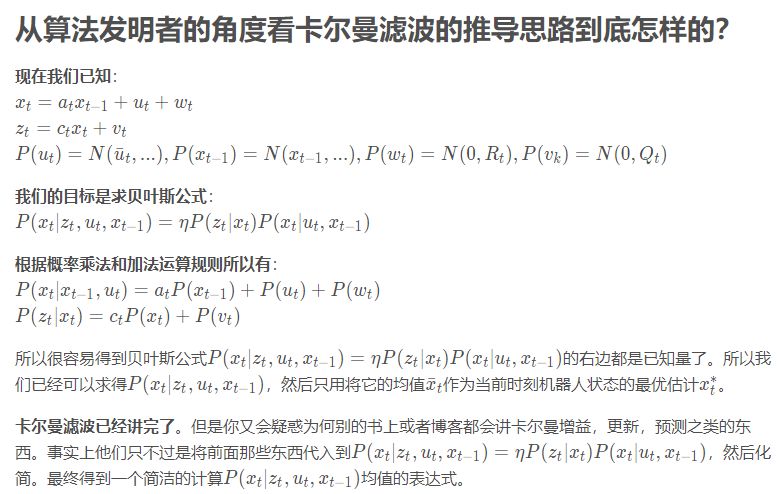
接下来是结论:
这部分内容(尤其是Bayesian filtering的引导公式)可能会引起疑惑,补充笔记见:
preview 🔗 [2022-08-02 - Truxton's blog] https://truxton2blog.com/2022-08-02/#(补充)Bayesian_Filtering到kalman_filter过渡的关键公式
