WARNING: This article may be obsolete
WARNING: This article may be obsoleteThis post was published in 2022-08-07. Obviously, expired content is less useful to users if it has already pasted its expiration date.
 This article is categorized as "Garbage" . It should NEVER be appeared in your search engine's results.
This article is categorized as "Garbage" . It should NEVER be appeared in your search engine's results.Table of Contents
今天从哪里开始?
今天从哪里开始?
Kalman filter
更具体一点:从协方差矩阵的计算开始
昨天的笔记里,通过学习b站的视频,了解到了一个用kalman filter计算小车匀加速运动的例子,但是这个例子只进行到80%左右就结束了,导致我没有完全理解它。
今天继续,但从另一个网站开始(同样使用了类似小车匀加速的案例):🔗 [卡爾曼濾波] https://www.kalmanfilter.net/CN/default_cn.aspx
学习kalmanfilter.net
alpha-beta-gamma滤波器
🔗 [alpha - beta - gamma 滤波器] https://www.kalmanfilter.net/CN/alphabeta_cn.html.
* 注意:下面的几个例子都属于[mathjax]\alpha-\beta-(\gamma)[/mathjax]滤波器,不是kalman filter!
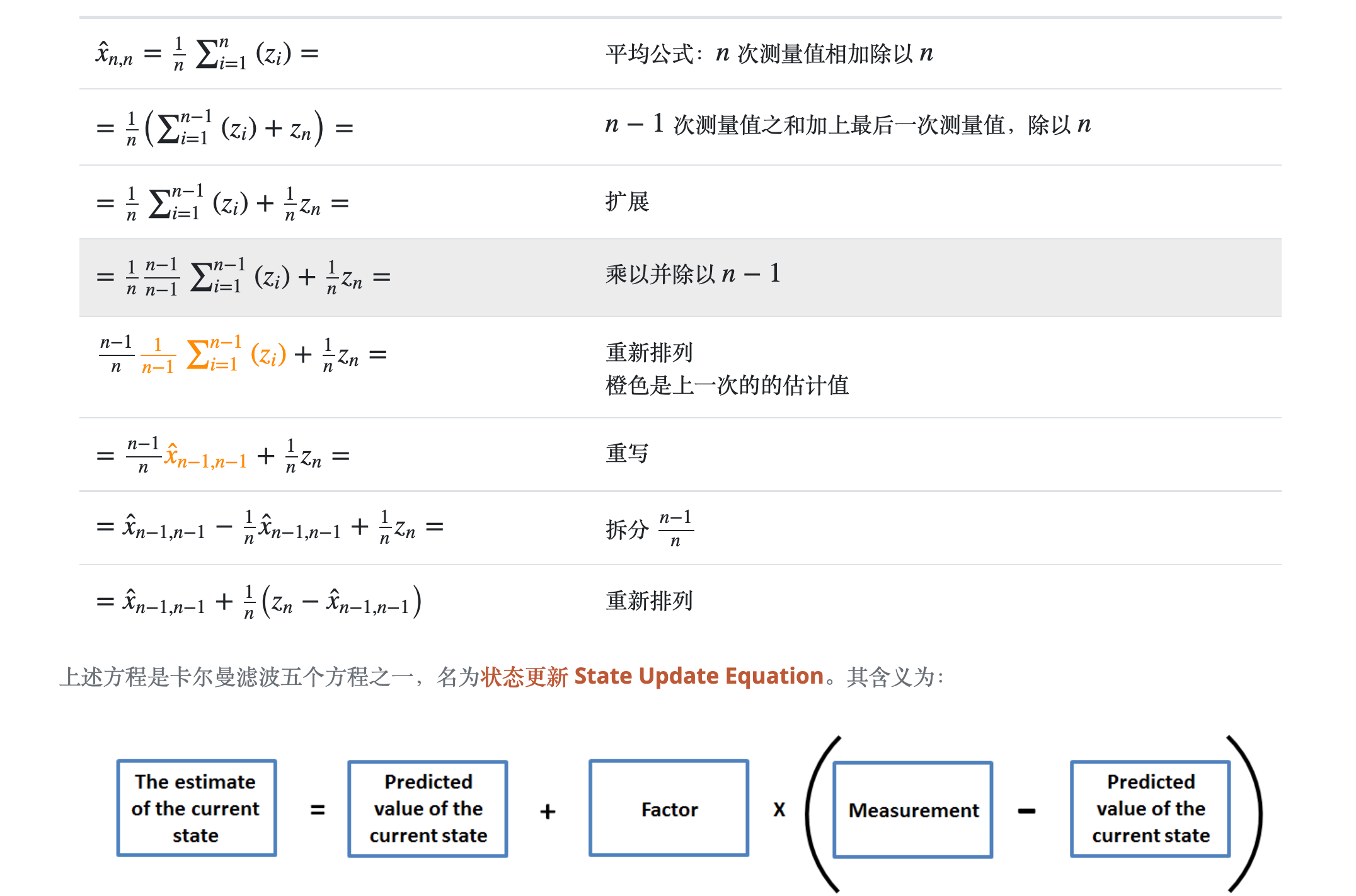
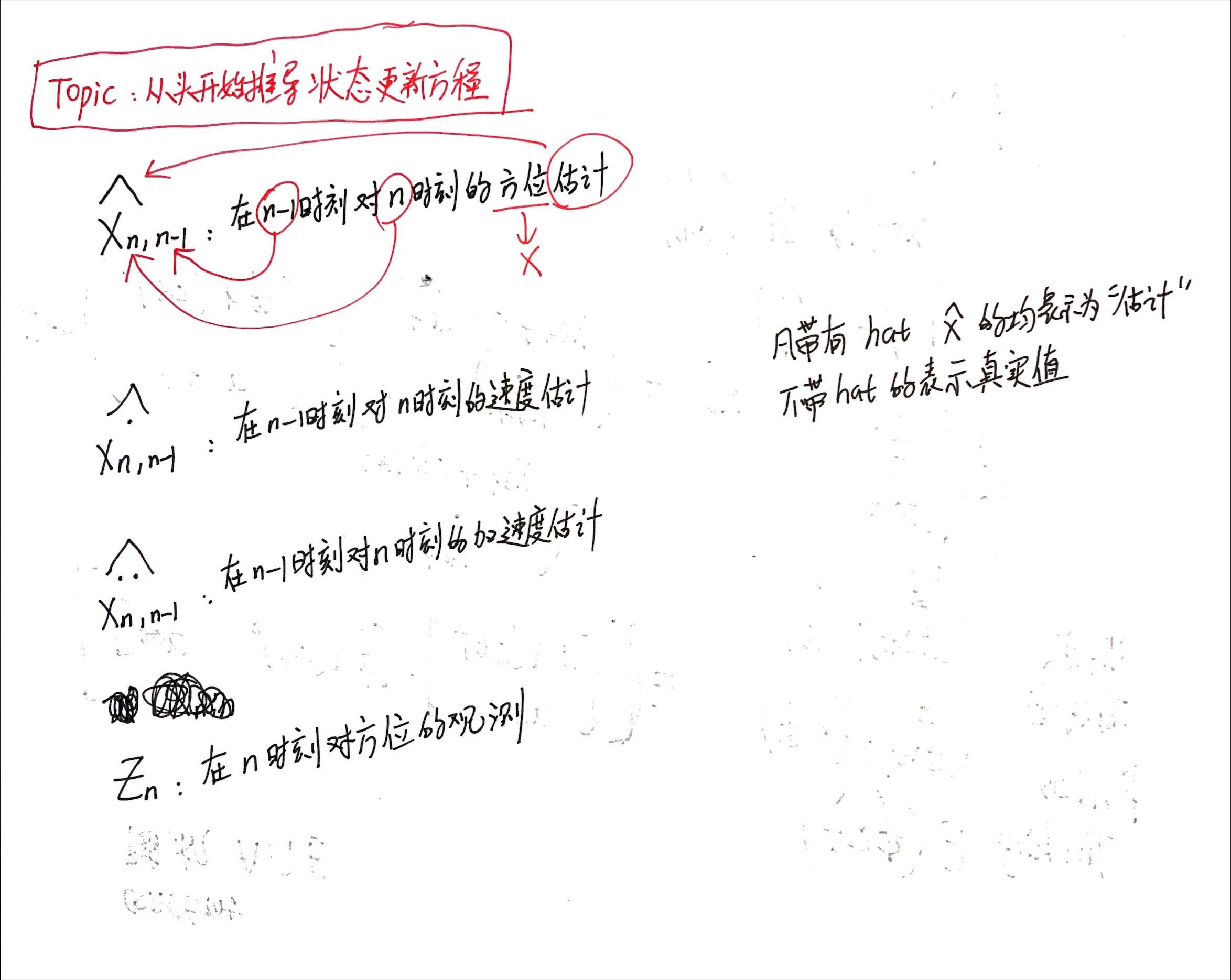
关键内容:用一个比小车匀加速更简单的场景推导出状态更新方程(尽管场景和滤波器不是kalman,但推导出的方程是kalman filter的一部分):

继续学习,接下来学习了另一个案例:
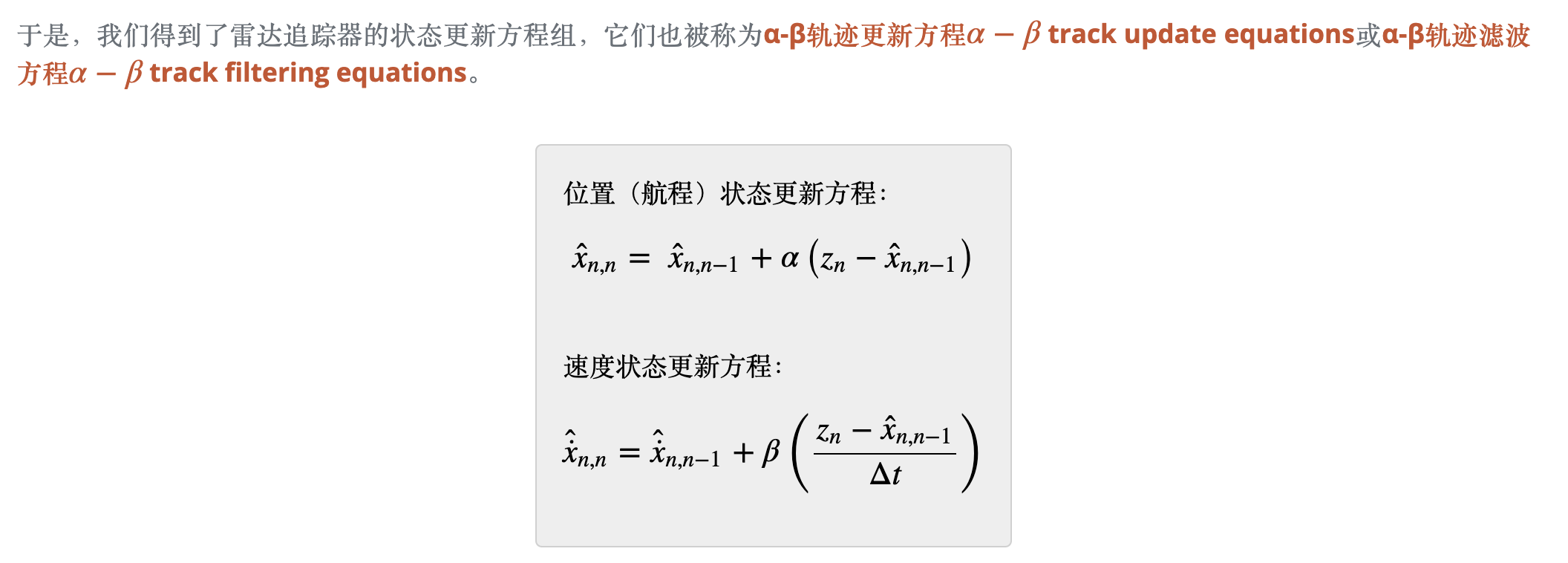
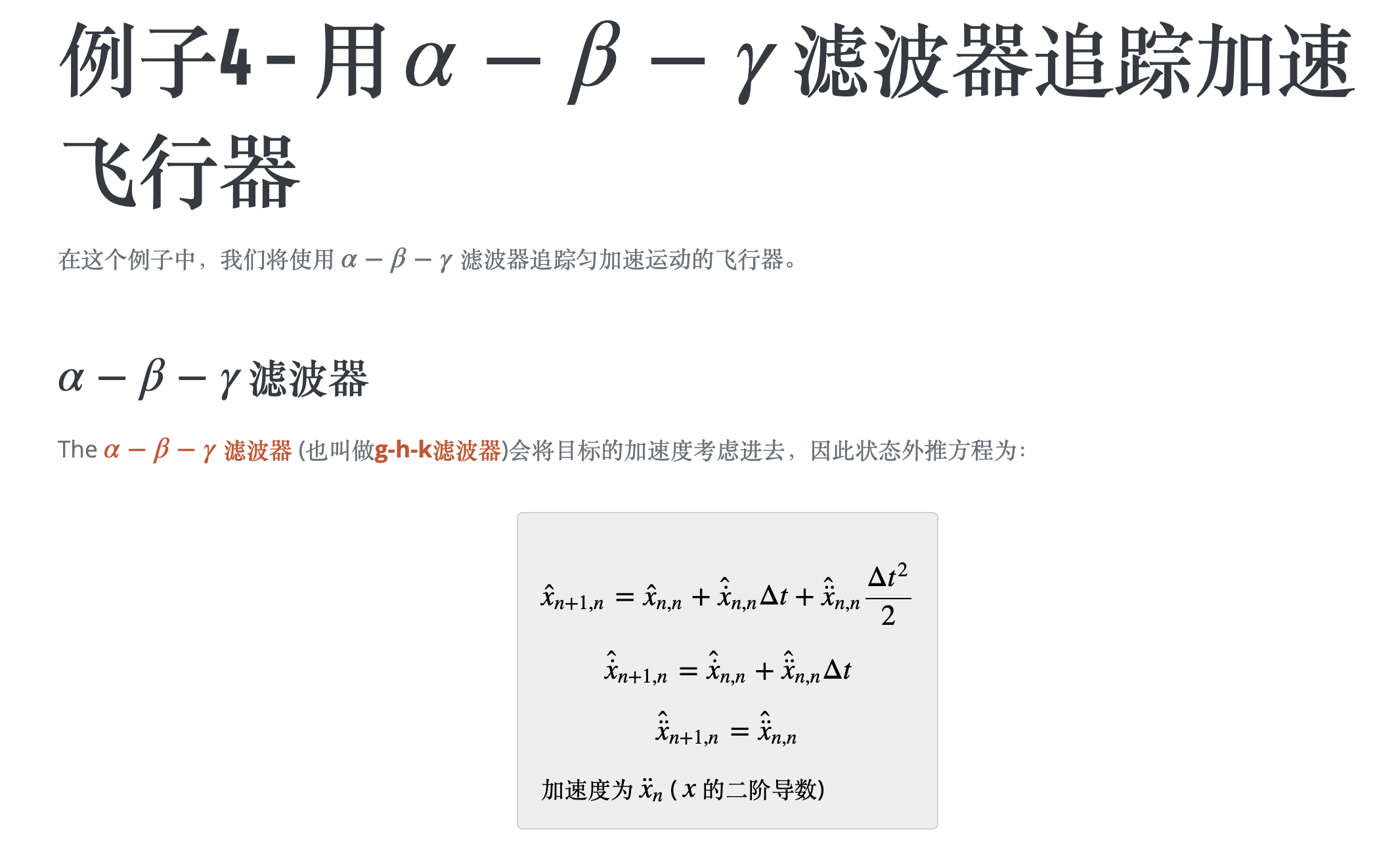
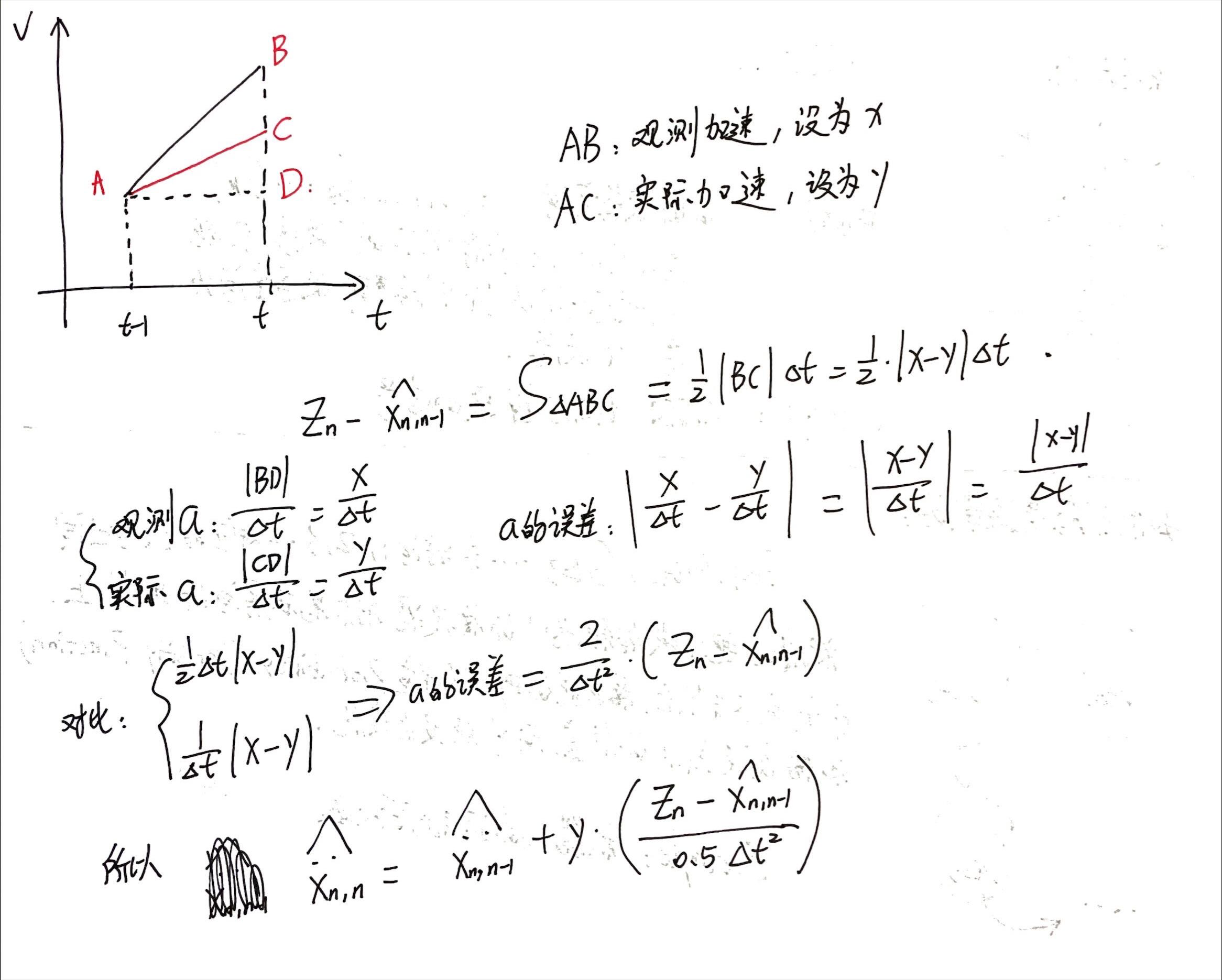
下一个例子:匀加速飞机追踪:
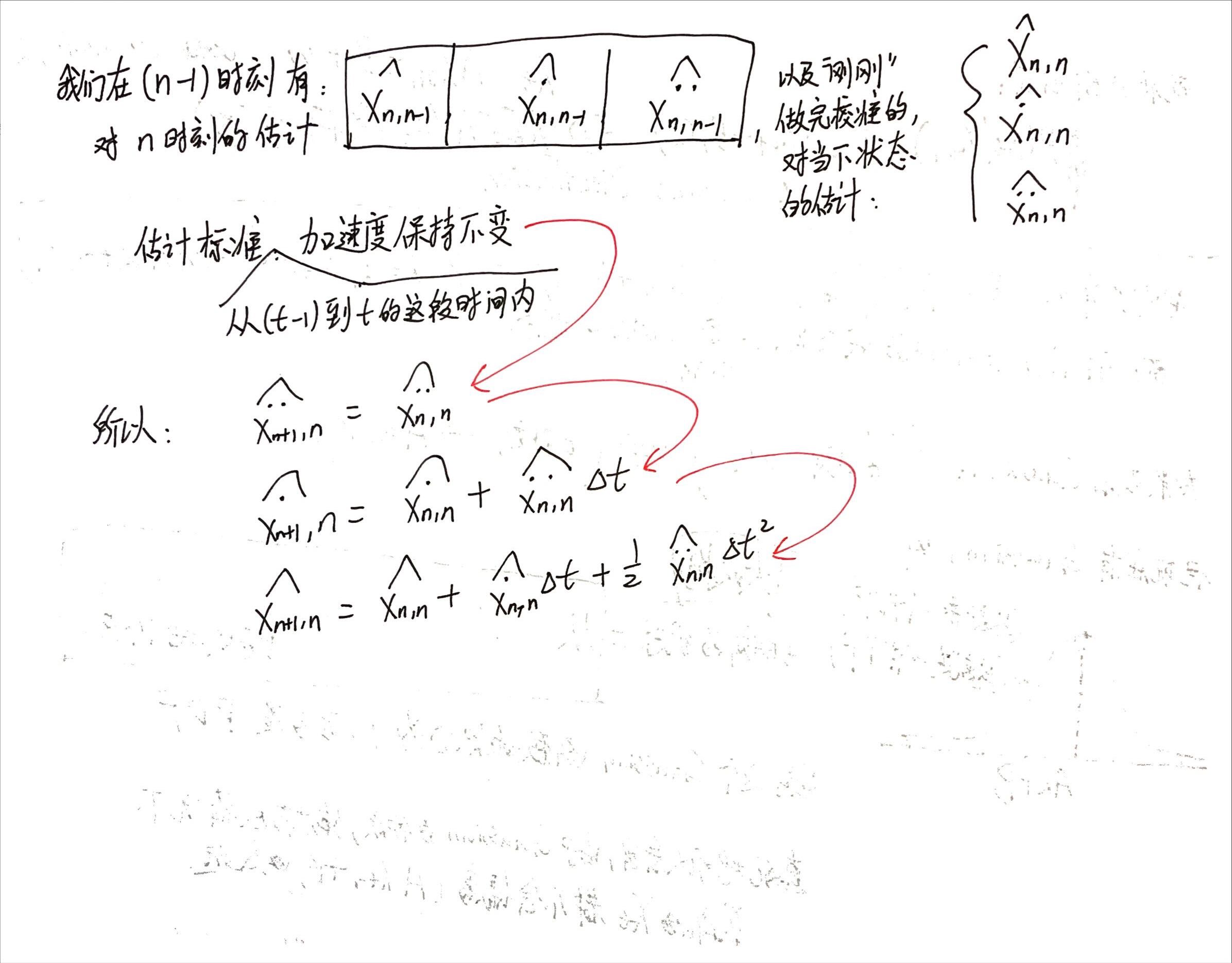
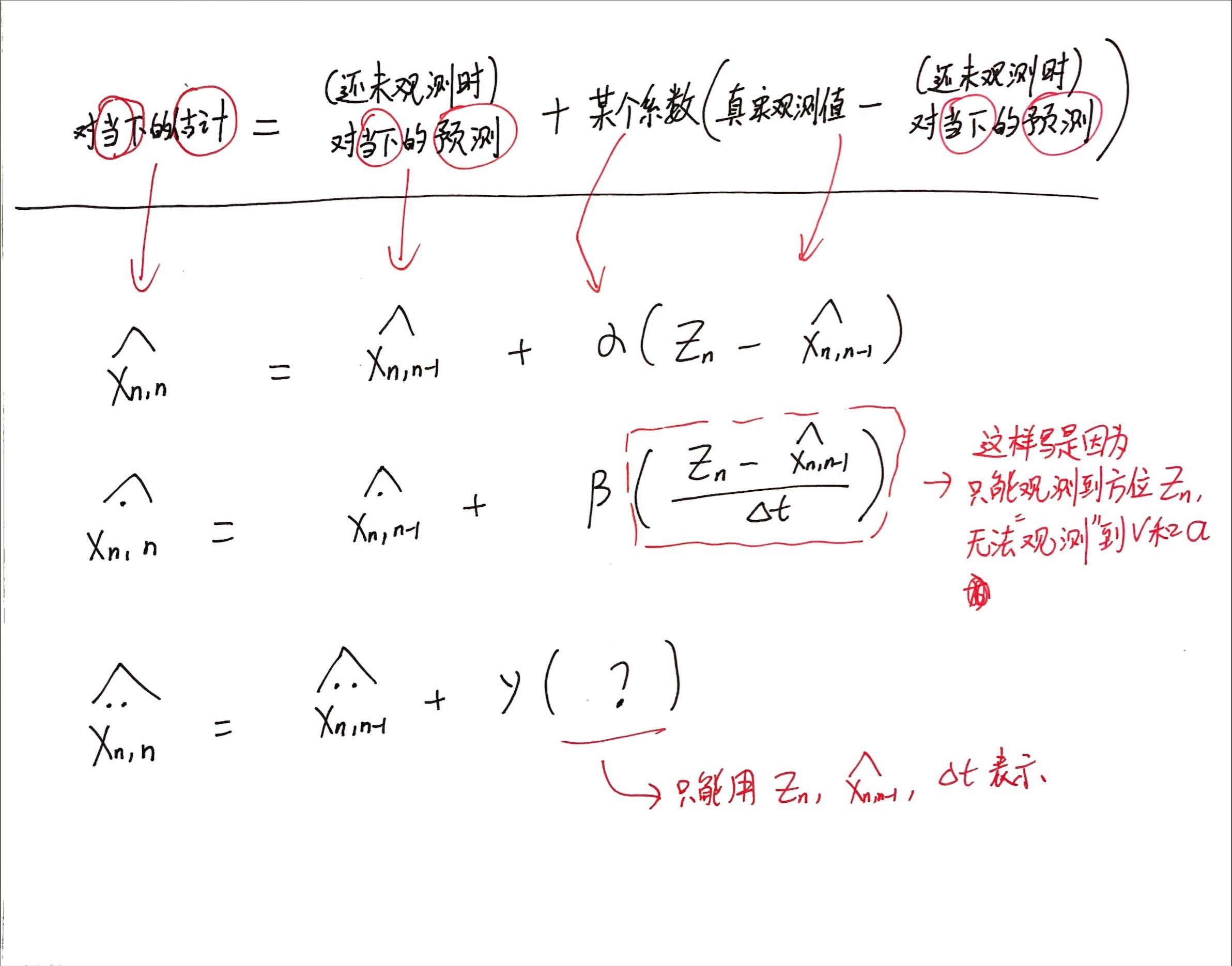
总结一点小技巧,以及推导过程(4张):
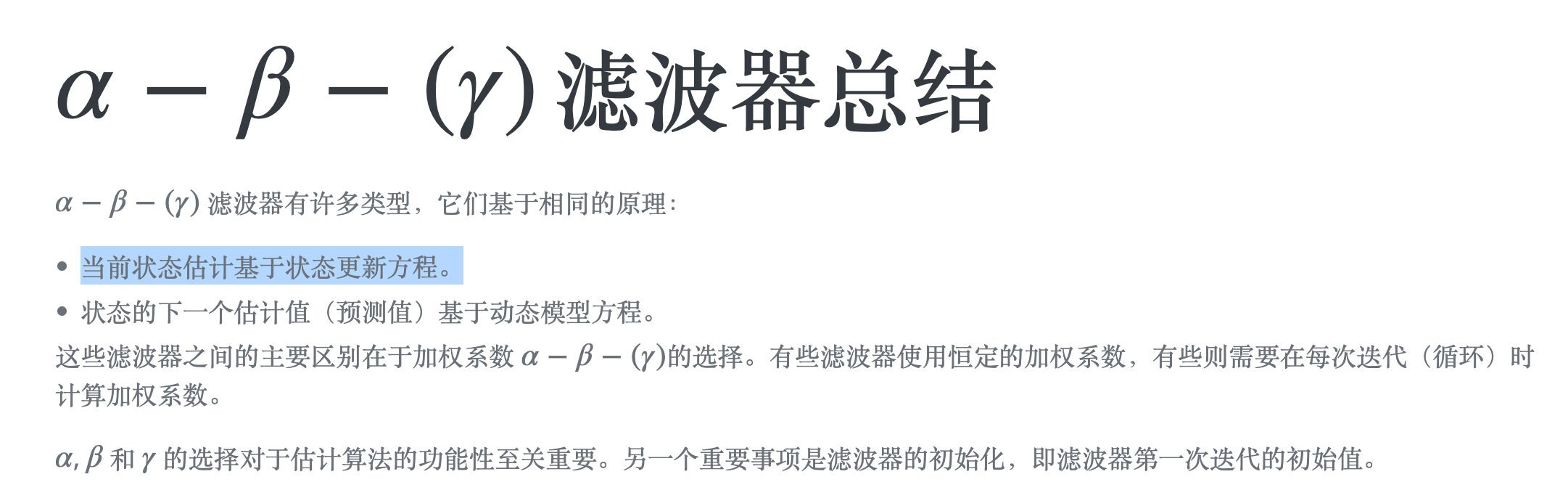
上面学的这几个例子(恒重金条,匀速飞机,匀加速飞机)都属于[mathjax]\alpha-\beta-(\gamma)[/mathjax]滤波器,下面是对这种滤波器的总结:
其中蓝色高亮的部分可能是这个滤波器最重要的性质。
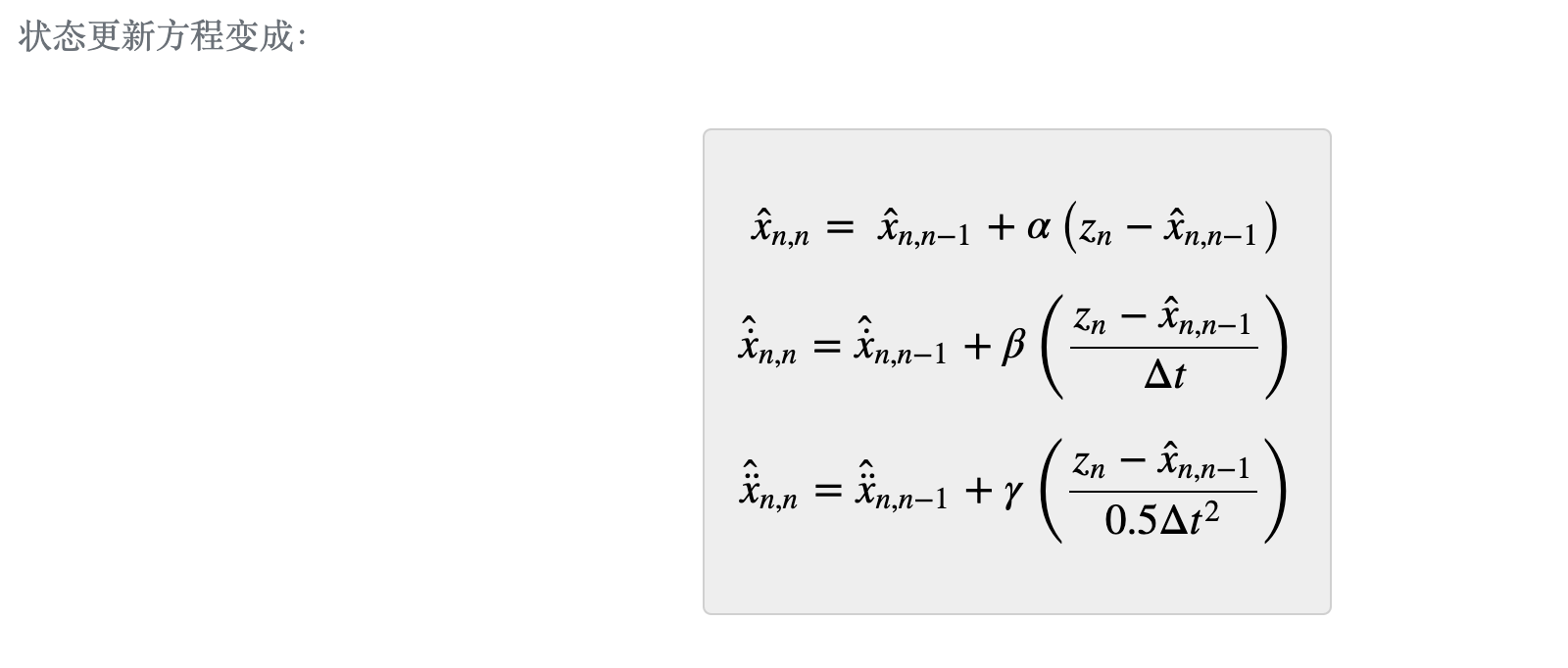
然后再次回顾状态更新方程:

kalman filter的5个基本方程
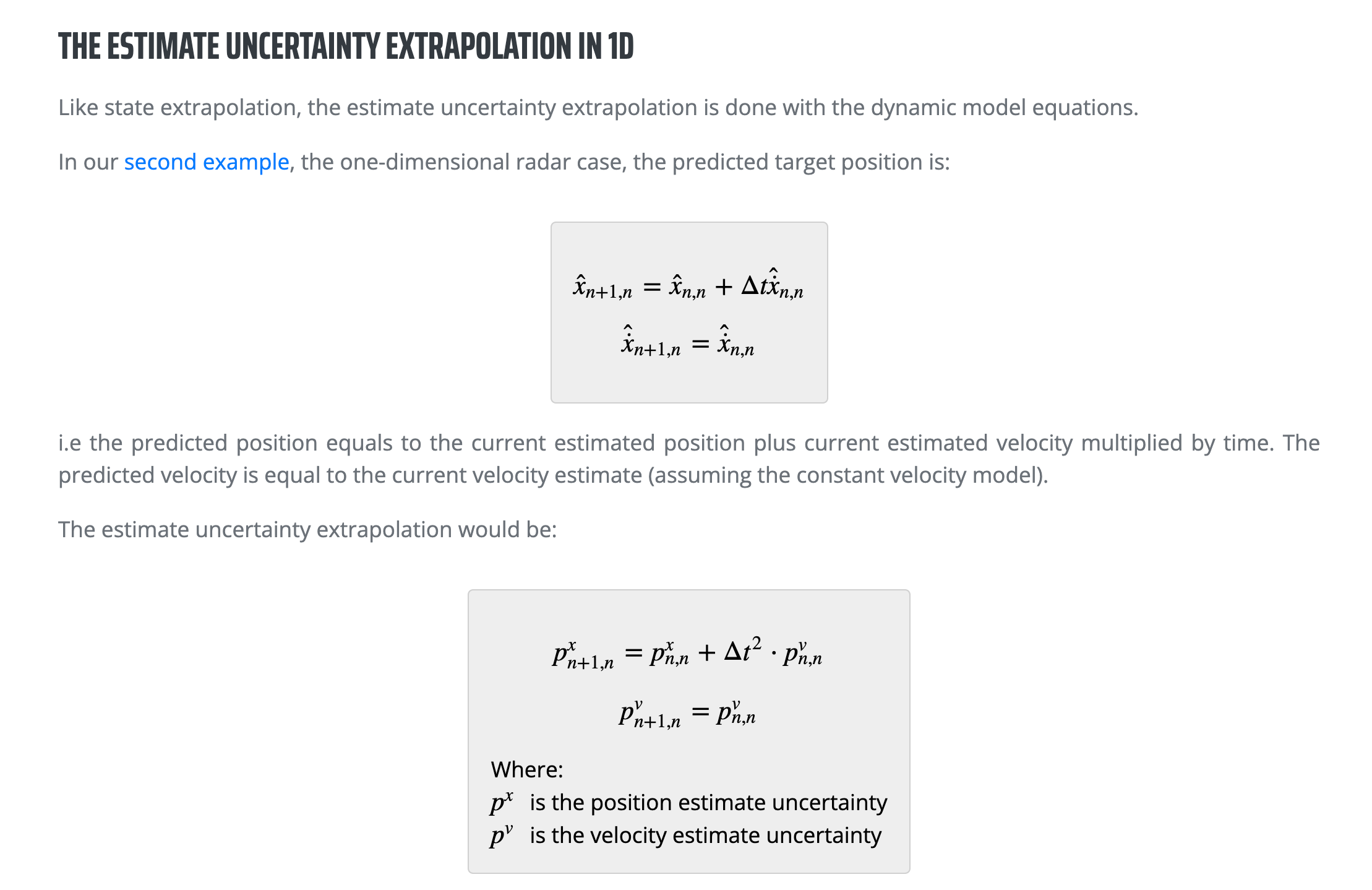
接下来学习:🔗 [Kalman Filter in one dimension] https://www.kalmanfilter.net/kalman1d.html
哎呀,没有中文翻译了,只能看英文原文了。

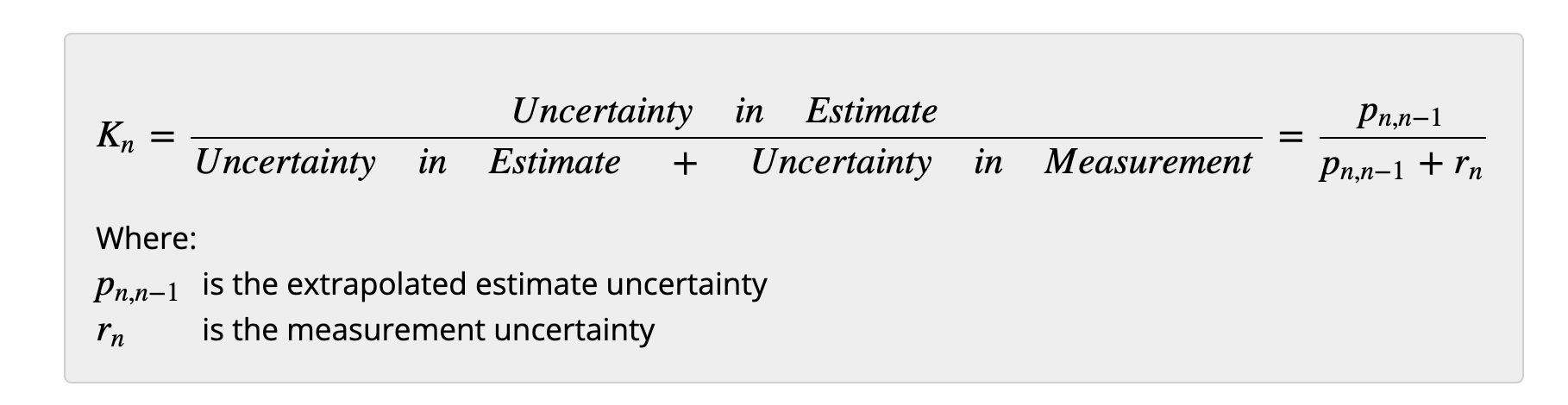
接下来学习了第3个方程:

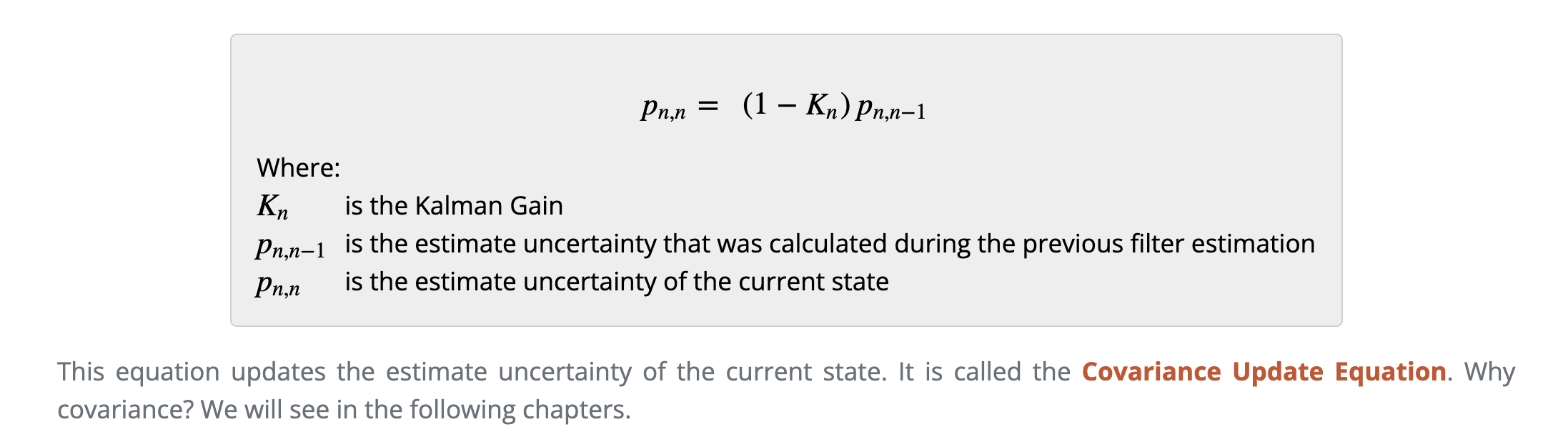
接下来学习第4个方程,它的计算需要用到第3个方程所得的kalman gain:
第5个方程:暂时还有点疑惑,先摆在一边:
接下来回顾5个kalman filter方程:
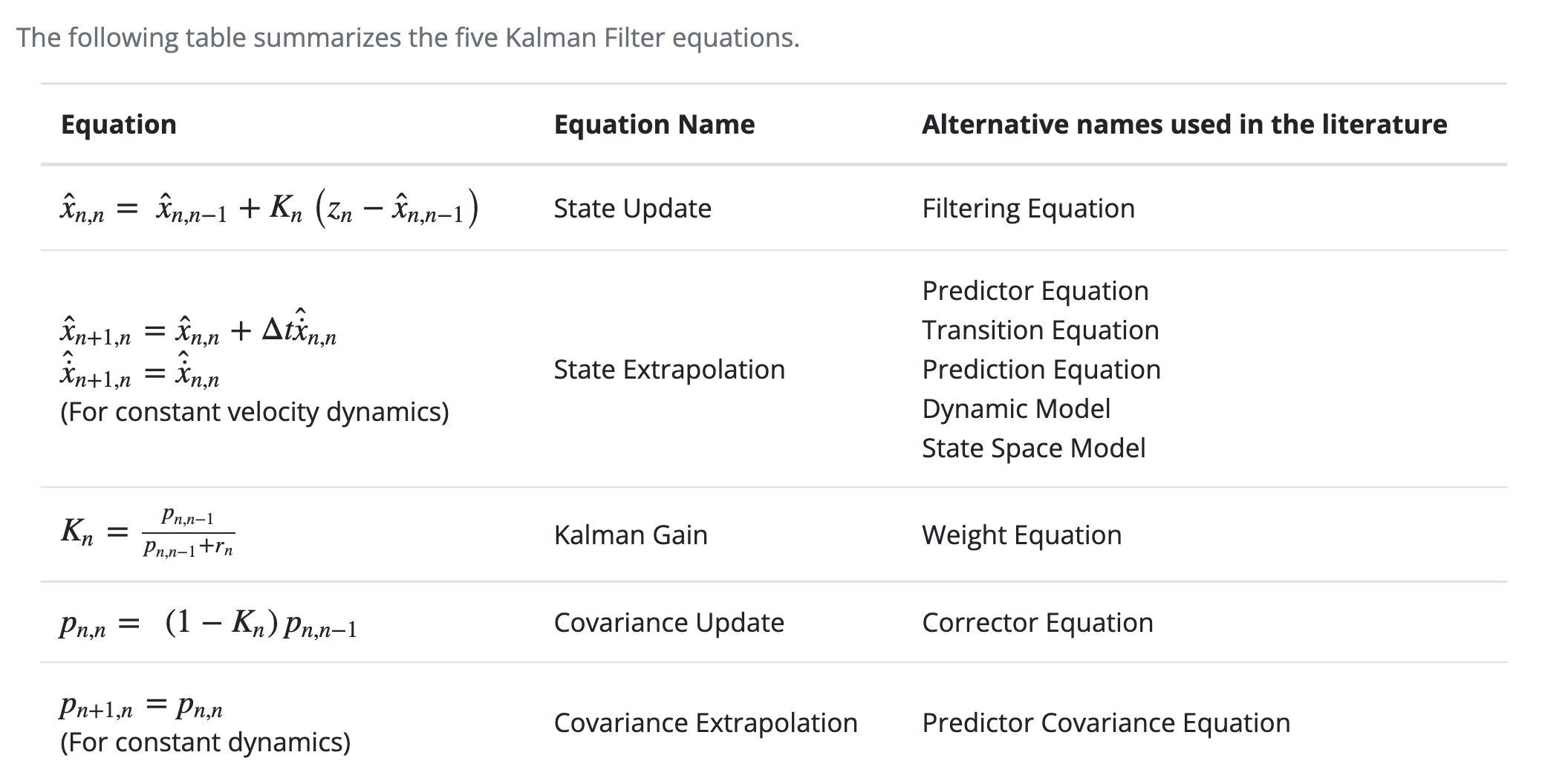
下面是一些笔记:
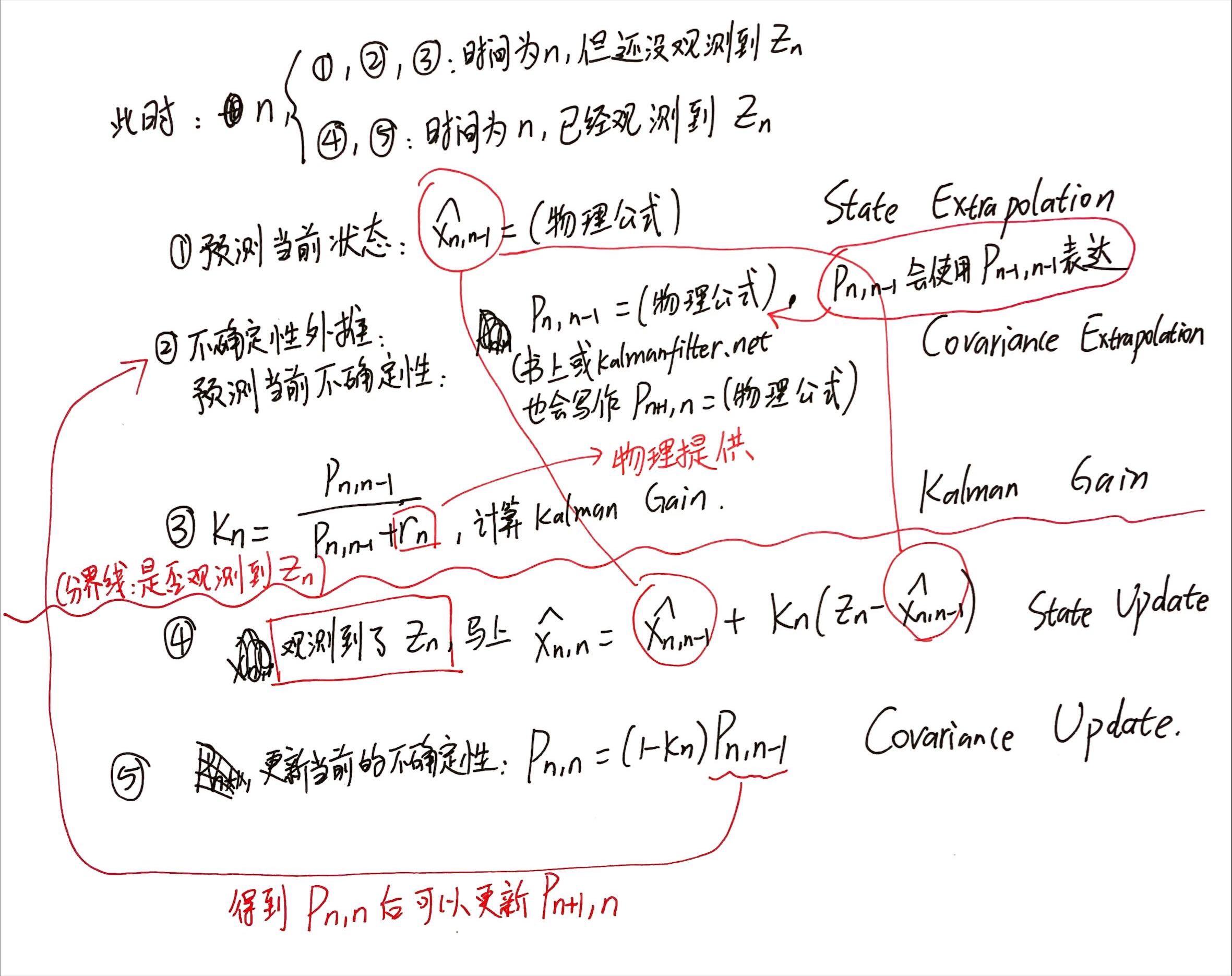
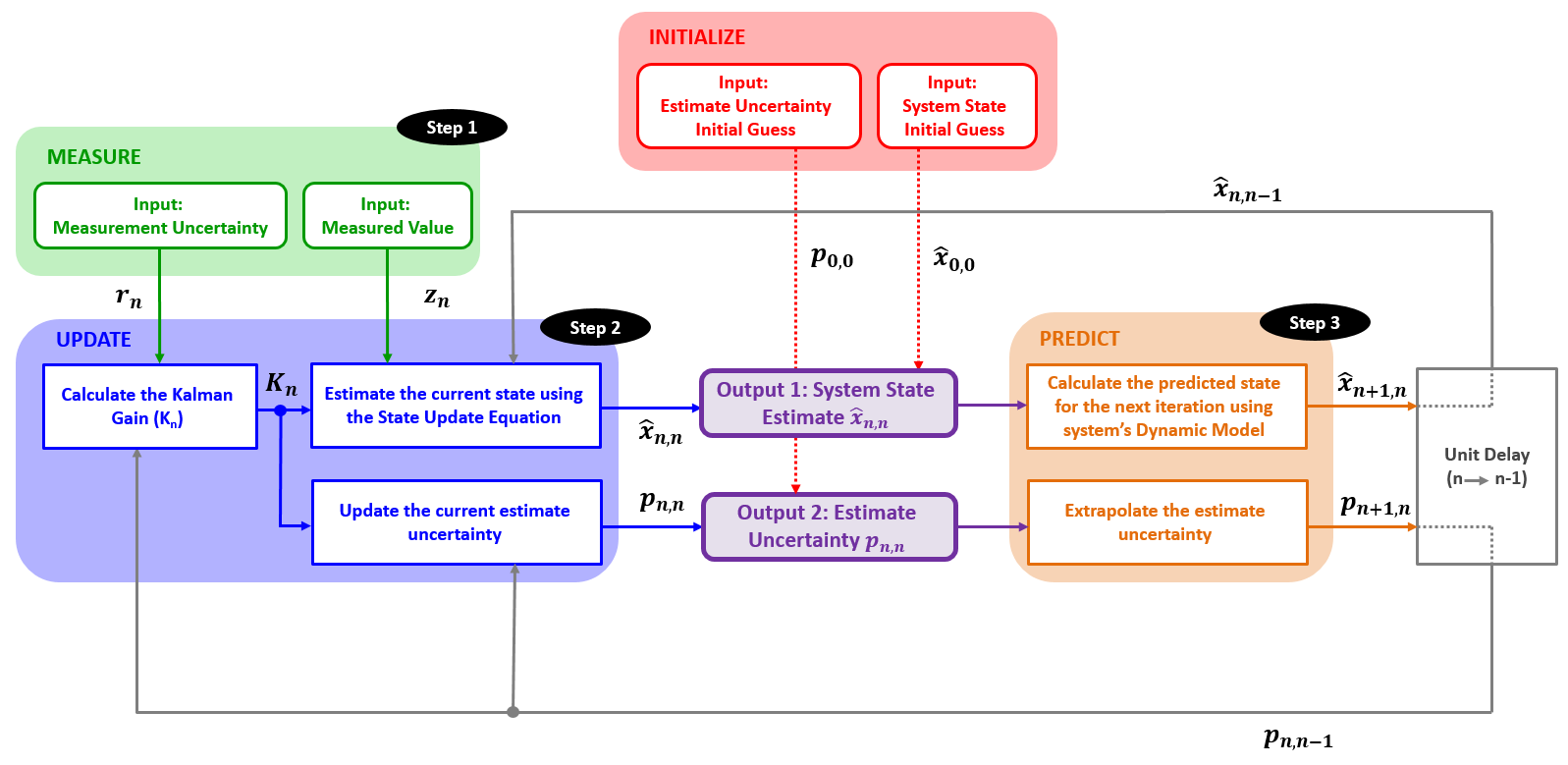
kalman filter总流程
kalman filter总流程:
简化版笔记:
(和上面那张图可能有一点不同,但总体思路是一样的)
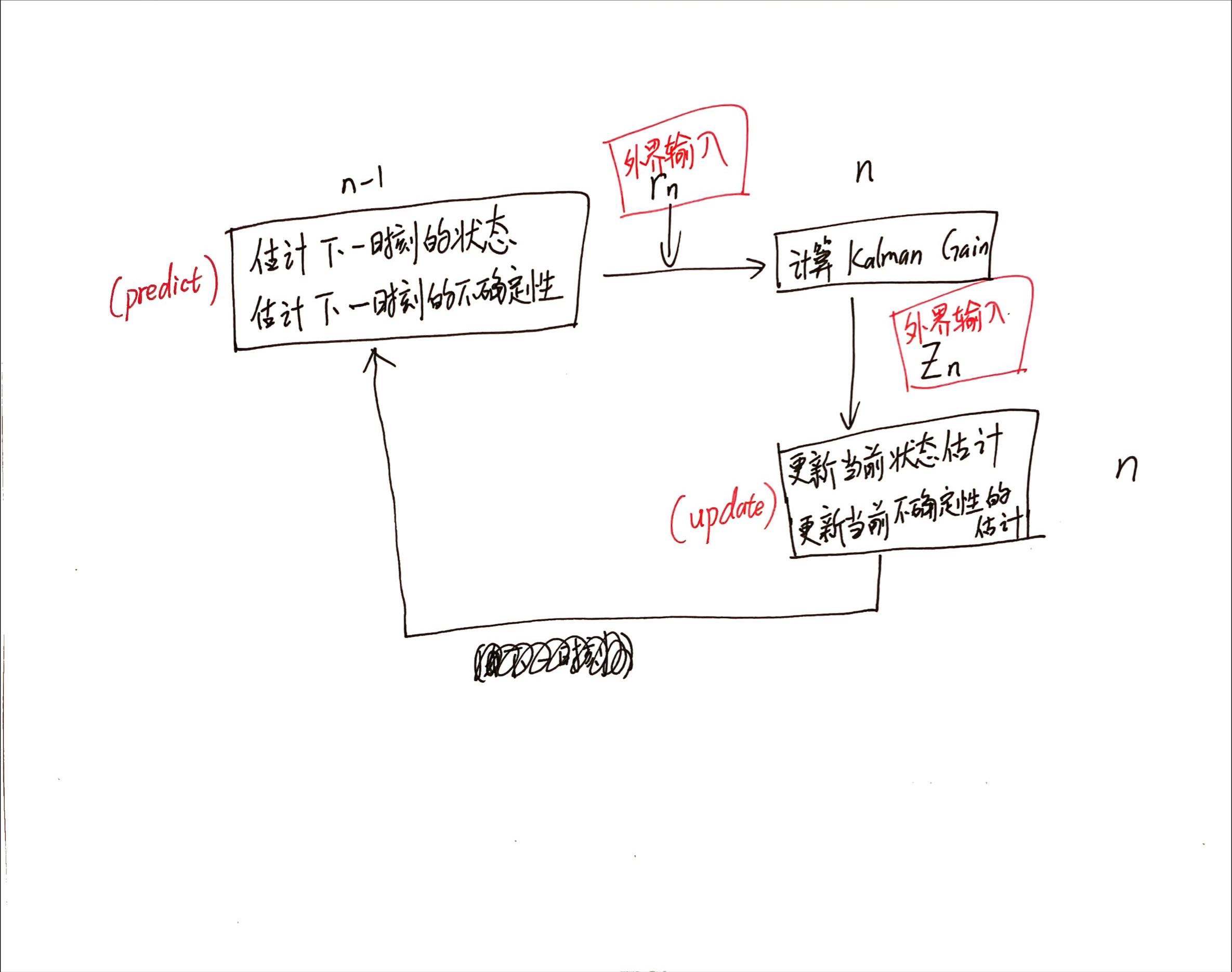
值得注意的是,最开始初始化模型以后马上就开始预测下一时间的状态了,这个步骤看起来和之前学bayesian filtering的初始化略有不同。
kalman filter的停止条件
kalman filter的停止条件
一直不停地滤波,有没有什么参数可以判断模型的收敛?
等等!好像有点不对。我们确实可以保证从[mathjax]P_{n,n-1} \leq P_{n,n}[/mathjax],但执行Covariance Extrapolation(从[mathjax]P_{n,n}[/mathjax]到[mathjax]P_{n+1,n}[/mathjax])的时候就一定能保证[mathjax]P_{n+1,n} \leq P_{n,n}[/mathjax]?
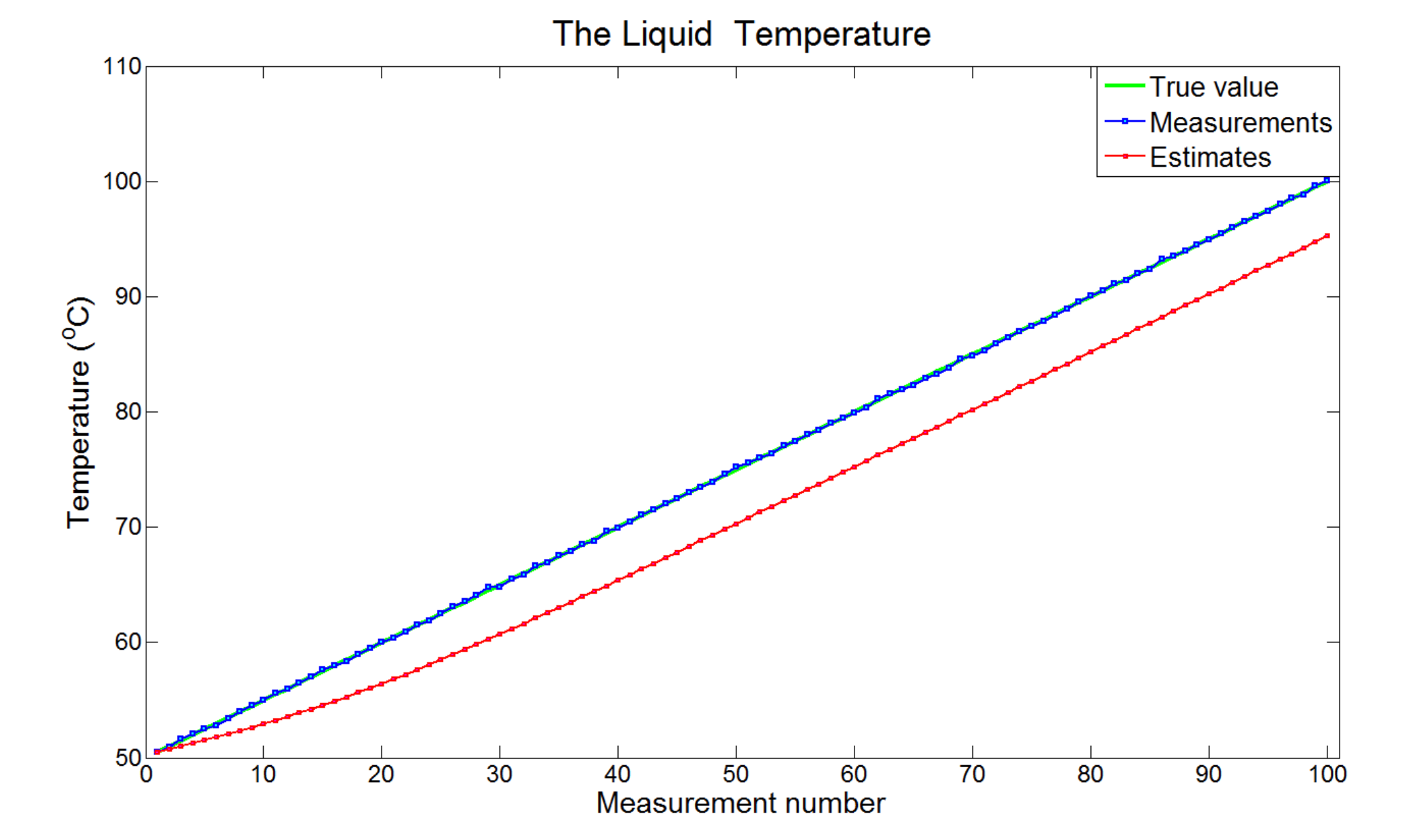
似乎确实如此,在后面一些的例子里(测量水箱的水温)就出现了[mathjax]P_{n+1,n} > P_{n,n}[/mathjax]的情况(这里引入了噪声):

杂乱的内容:kalman gain的直观解释, lag error
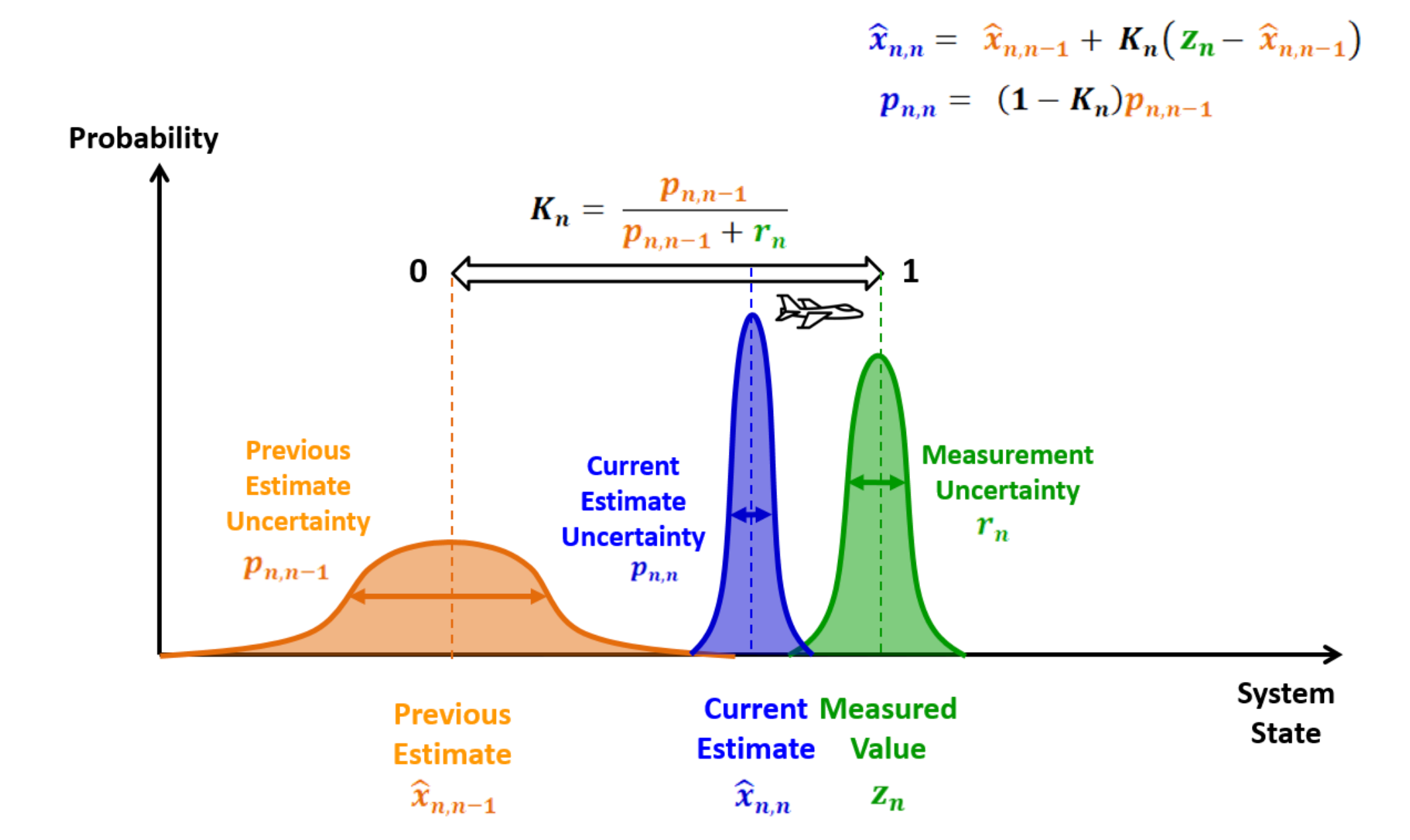
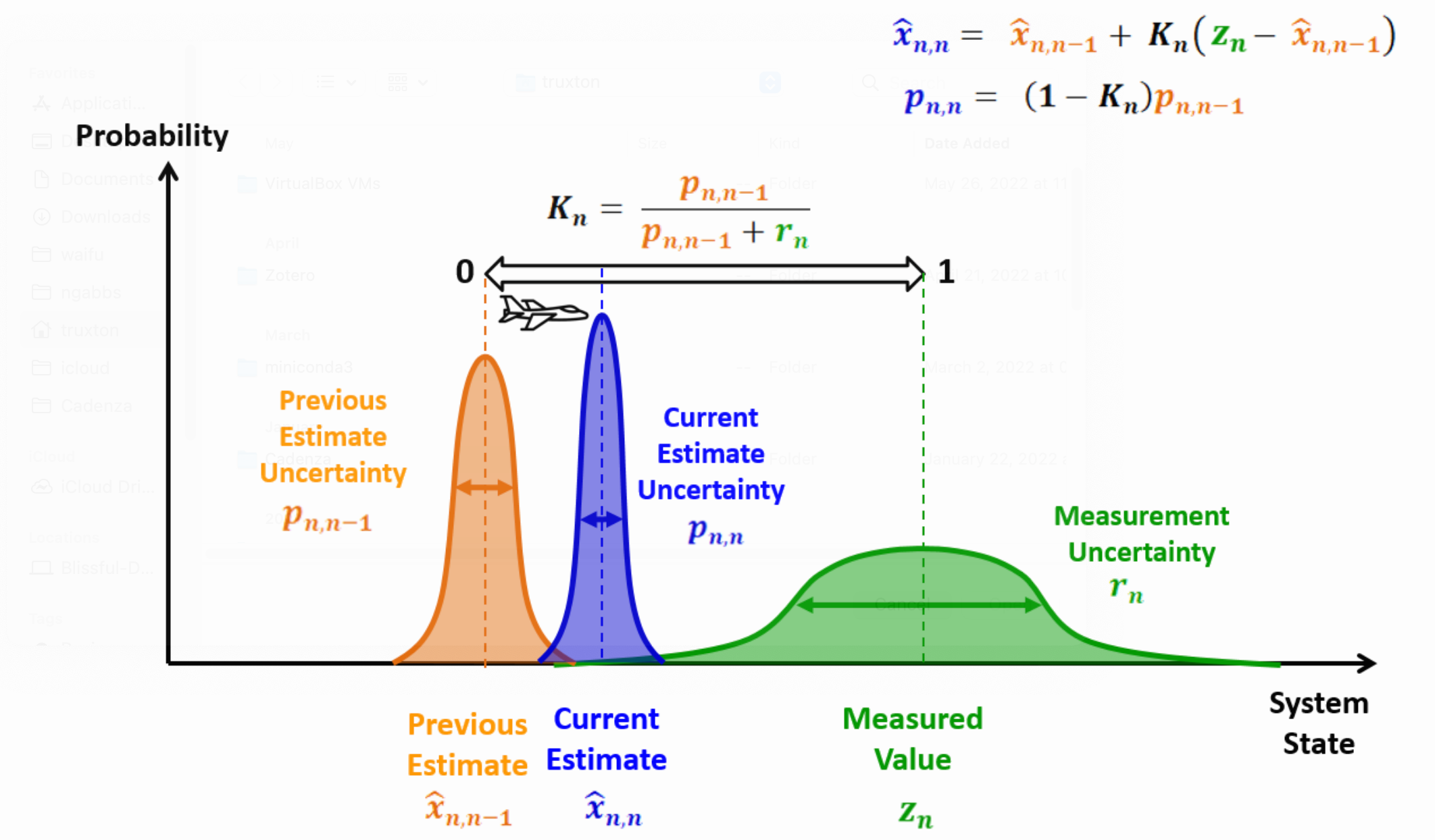
基本步骤了解了,现在开始学习一些细节:
对kalman gain的直观解释:
kalman gain的证明
🔗 [One-dimensional Kalman Gain Derivation] https://www.kalmanfilter.net/KalmanGainDeriv.html
注意到这一步:
这里使用了这个公式:(来源)
[mathjax-d]\operatorname{Var}[\mathrm{kX}+\mathrm{c}]=\mathrm{k}^{2} \cdot \operatorname{Var}[\mathrm{X}][/mathjax-d]再注意到这一步:
这一步的本质是:令导数为0求最优解:
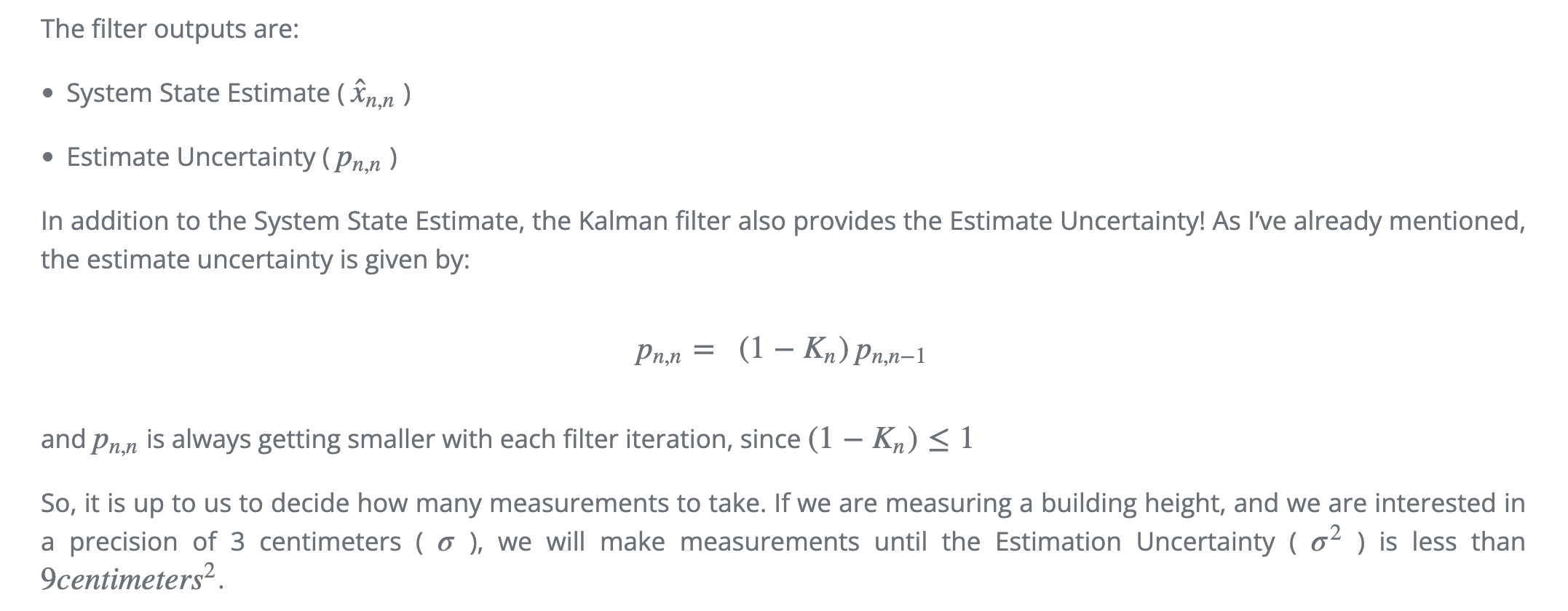
[mathjax-d]\frac{dp_{n,n}}{dk_{1}}=0[/mathjax-d]现在开始做一道例题:测量建筑高度
并不难,和之前学过的「金条称重」类似,但多了一个区别:此时不仅会考虑estimate uncertainty,还会考虑measurement uncertainty.
其中estimate uncertainty和kalman gain会不断变化。
现在添加噪声影响,具体影响在这个公式:(注意下面的公式是由物理系统决定的,不同场景下的公式不一样)
[mathjax-d]p_{n+1, n}=p_{n, n}+q_{n} \ \ \ ( *\text{constant dynamics only}*)[/mathjax-d]lag error
留到后面再总结

这里有一个很严重的问题:我怎么知道我出现lag error了?
如上图所示,到达一定迭代次数后,lag error变成了一个constant,那我该如何判断?
(待补充)
(注:该想法未经资料证实)目前想到的唯一方法就是观察kalman gain的大小:如果太小,kalman filter就变成了以推测结果为主、观测结果为辅的模型,似乎失去了原本的作用和意义。
继续看下一章:
🔗 [Multidimensional Kalman Filter] https://www.kalmanfilter.net/kalmanmulti.html
协方差、协方差矩阵的计算(附带例题)
接下来开始进入带有矩阵推导的部分,先看一些基本数学公式:
🔗 [The background break] https://www.kalmanfilter.net/background2.html



此外还有一个来自wikipedia的总结:
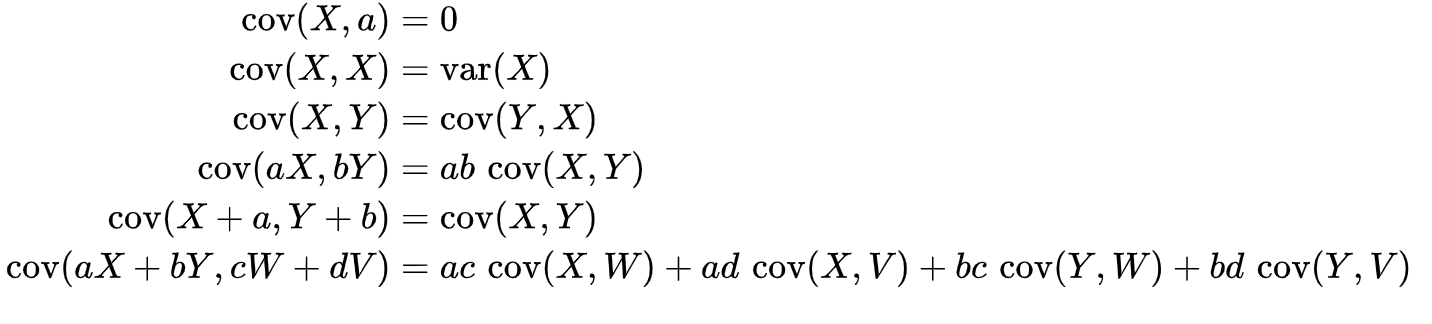
公式看起来都不难推导,但一做起真实数据的题就头大,需要再学习巩固一下:
非常令人恼火,一直没能够找到什么好用的资料(我需要SOLID EXAMPLE!!!)
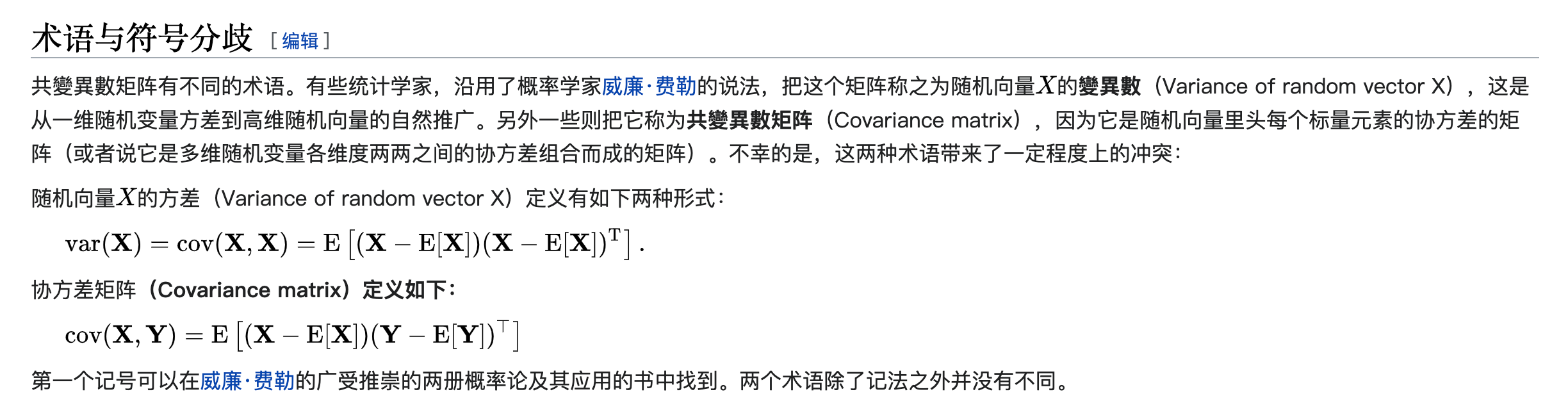
勉强找到了,先凑合用吧:搭配下面2个链接:使用第一个链接(wikipedia)的公式做第二个链接(CSDN)的题目
🔗 [协方差矩阵 - 维基百科,自由的百科全书] https://zh.wikipedia.org/wiki/协方差矩阵
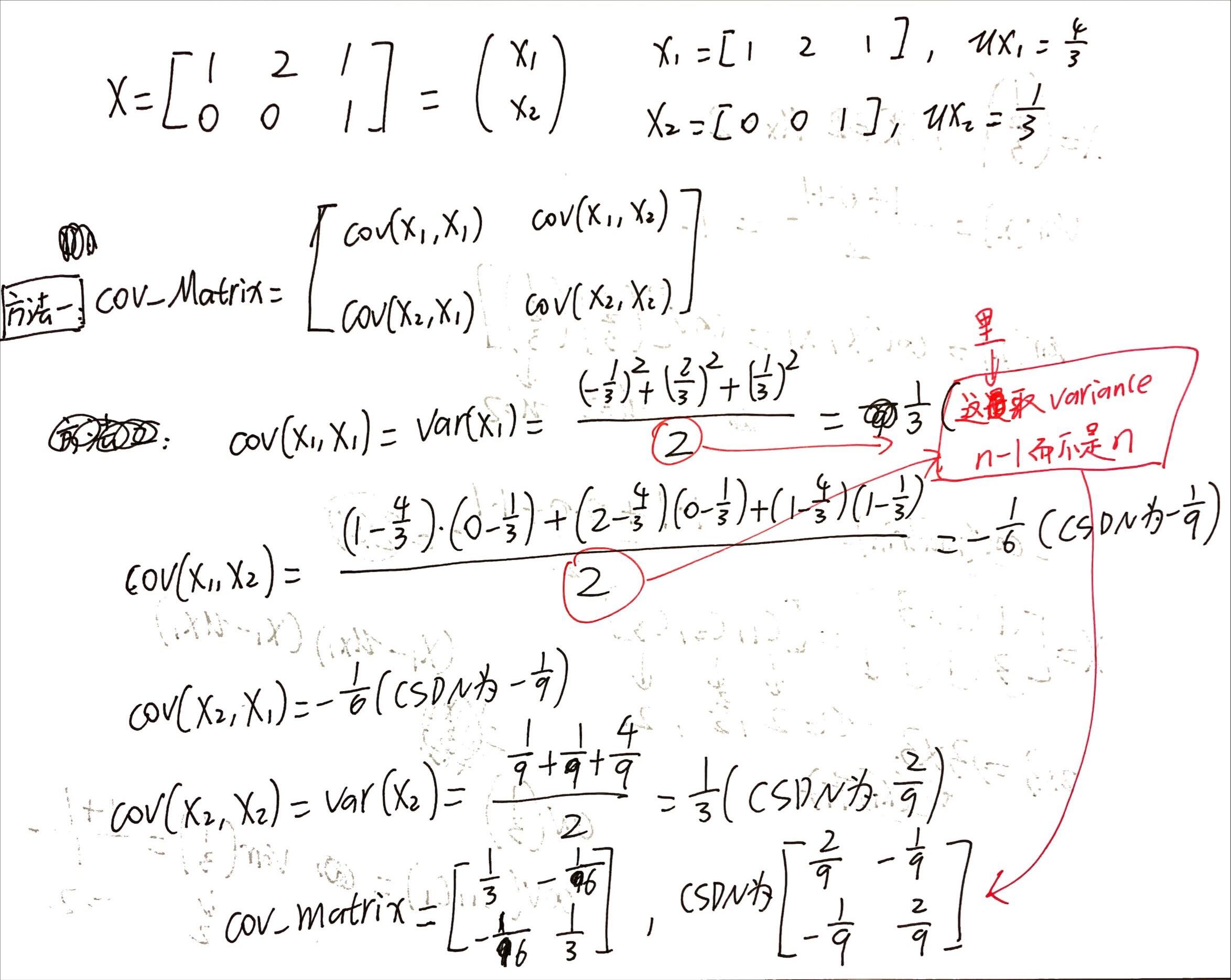
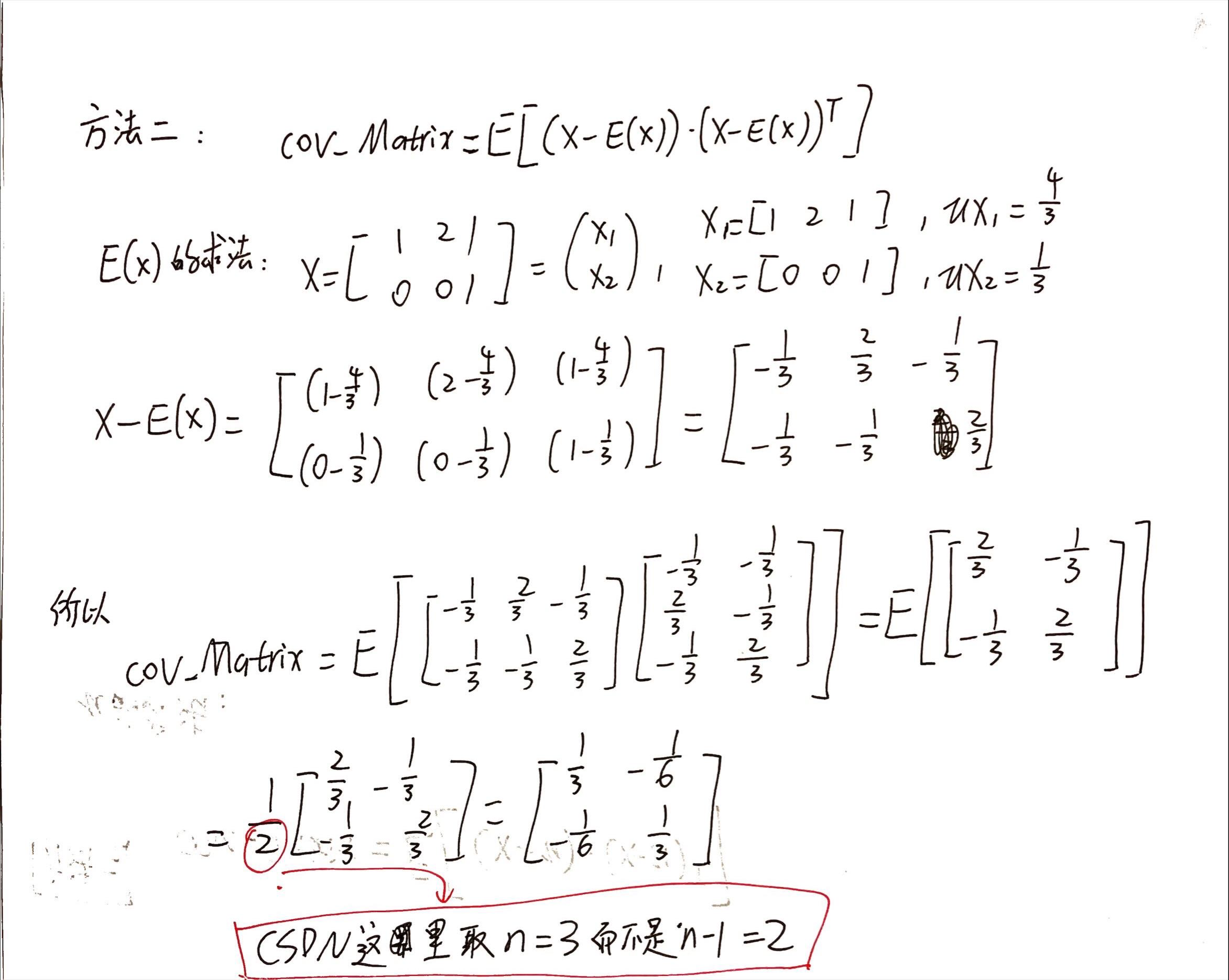
注意:这个例题里计算variance使用了n而不是n-1 🔗 [协方差矩阵的解法和例题拔牙的萌萌鼠的博客-CSDN博客协方差矩阵的求法例题] https://blog.csdn.net/Harry_Jack/article/details/109280048
注意:可以使用2种方法进行计算:
再补充一道例题:
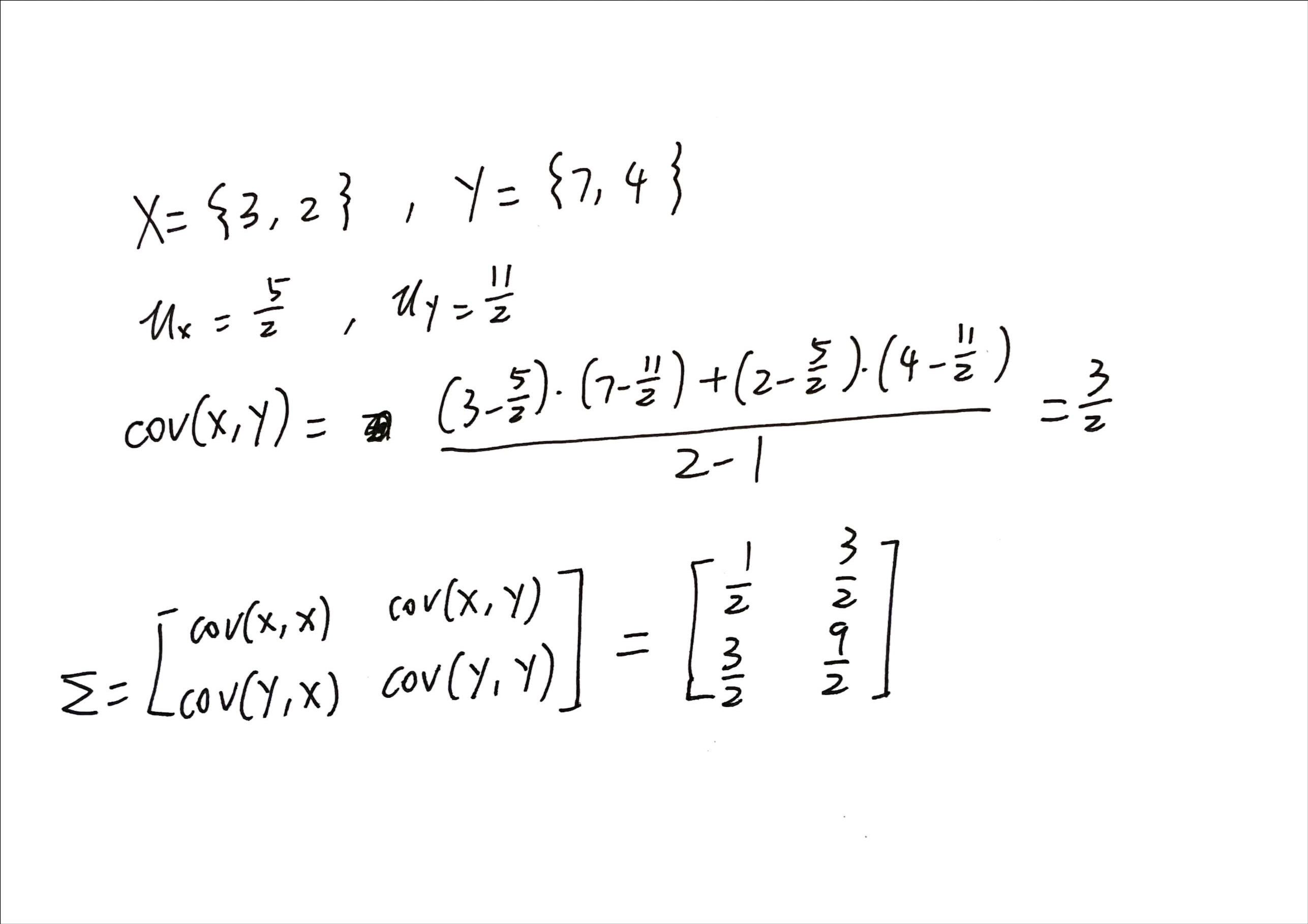
(来源)已知[mathjax]X=\{3,2\}, Y=\{7,4\}[/mathjax],求X和Y的协方差以及协方差矩阵。
答案:
covariance: 1.5
[mathjax-d]\Sigma=\left[\begin{array}{cc} \frac{1}{2} & \frac{3}{2} \\ \frac{3}{2} & \frac{9}{2} \end{array}\right][/mathjax-d]关键过程: