 WARNING: This article may be obsolete
WARNING: This article may be obsoleteThis post was published in 2023-09-07. Obviously, expired content is less useful to users if it has already pasted its expiration date.
 This article is categorized as "Garbage" . It should NEVER be appeared in your search engine's results.
This article is categorized as "Garbage" . It should NEVER be appeared in your search engine's results.原始标题:基于无向图模型的simulator(无框架, python, agent-based)
实际上本篇笔记大部分内容都是dijkstra而且没有完全学明白
无向图模型,G = <V, E>,图模型来自于对shapefile(.shp)文件的读取
然后运行Dijkstra Algorithm,可能会使用改良过的算法
需要考虑agent的位置处于Edge中间的状态(从一个Vertex到达另一个Vertex需要时间),但目前不会对Dijkstra算法或agent的运动产生影响
🔗 [GeospatialPython/pyshp: This library reads and writes ESRI Shapefiles in pure Python.] https://github.com/GeospatialPython/pyshp#reading-shapefiles
Dijkstra算法
翻了一圈,发现整个博客都没写过这个算法的笔记
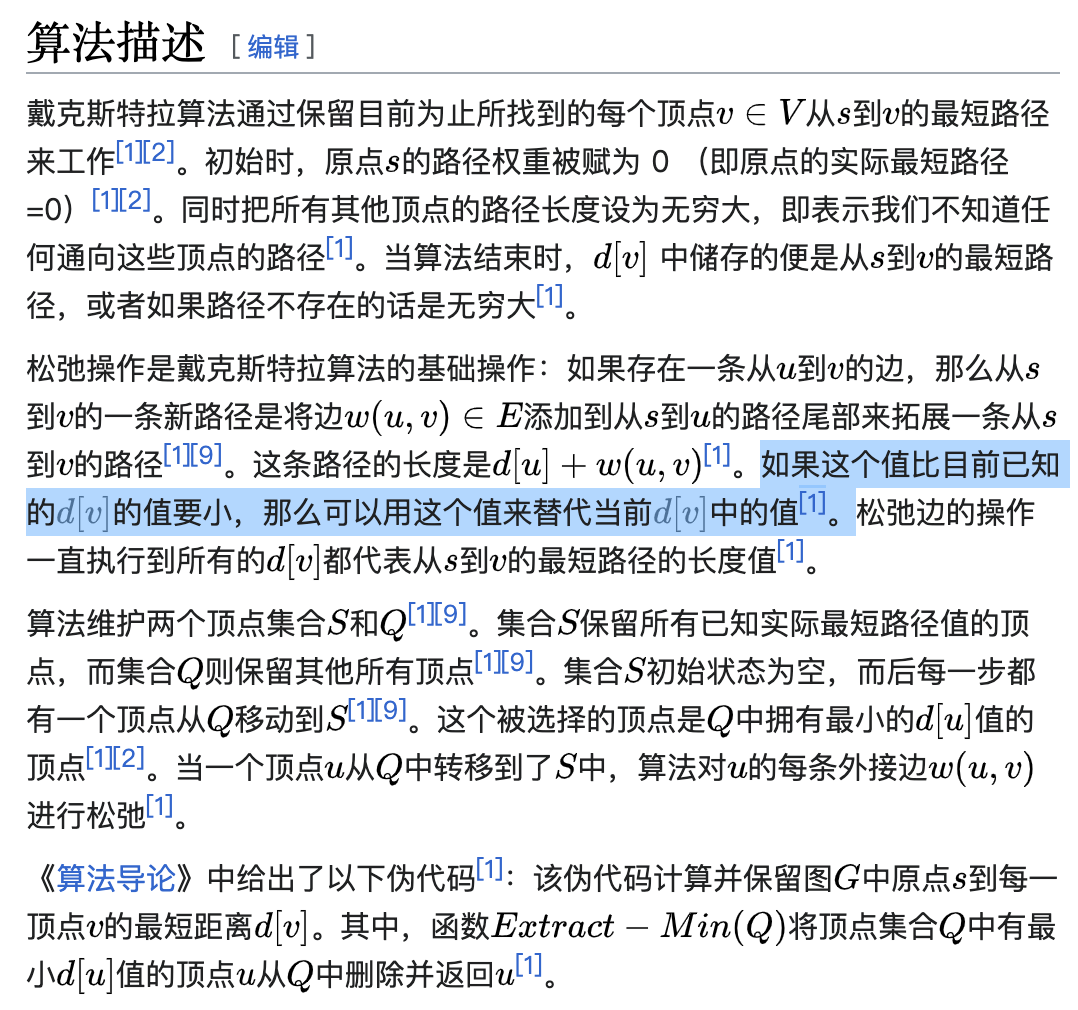
🔗 [戴克斯特拉算法 - 维基百科,自由的百科全书] https://zh.wikipedia.org/zh-hans/戴克斯特拉算法
几个关键点:
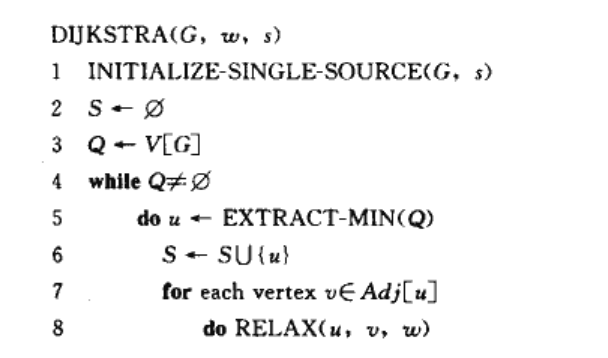
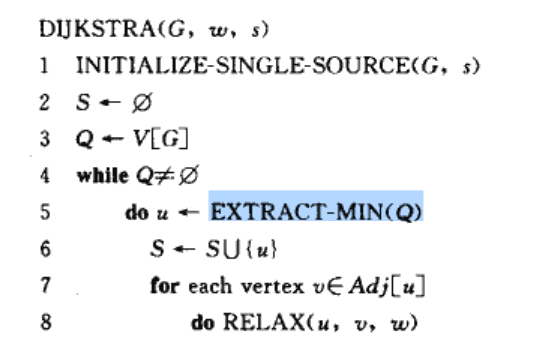
伪代码:
思考1:算法为什么第一眼看起来不严谨,但实际上是严谨的
以这张图为例,D点为出发点:
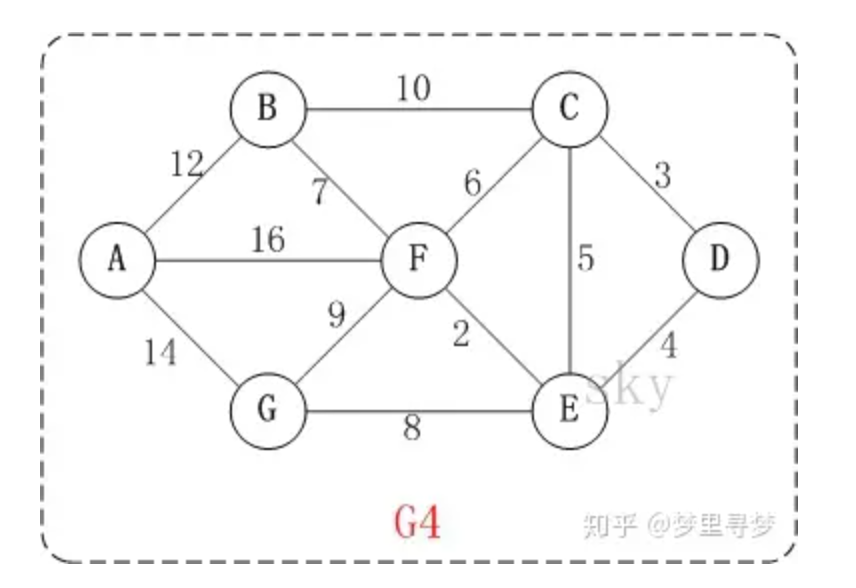
按照算法,把E从集合Q拿出来放到集合S的时候,d[E]=4,且这个数值放到集合S以后就不会再变了。但事实上我们做到这一步的时候只接触了D、C、E、F这几个点,连E <--> G这条边都没摸过,为什么就敢直接把E永久移动到集合S并且再也不用改变它的数值?
或者说,按照上面的疑问,如果故意做出这样一张图,还是从D点出发,Dijkstra算法会如何解决这个看起来故意针对上述疑惑的图?(也就是说,会不会存在一种情况,看似找到了通往E的最短距离DE = 4,但实际上还藏着一条很深很绕很长的路DKLME,这条路实际上拥有最短距离2)
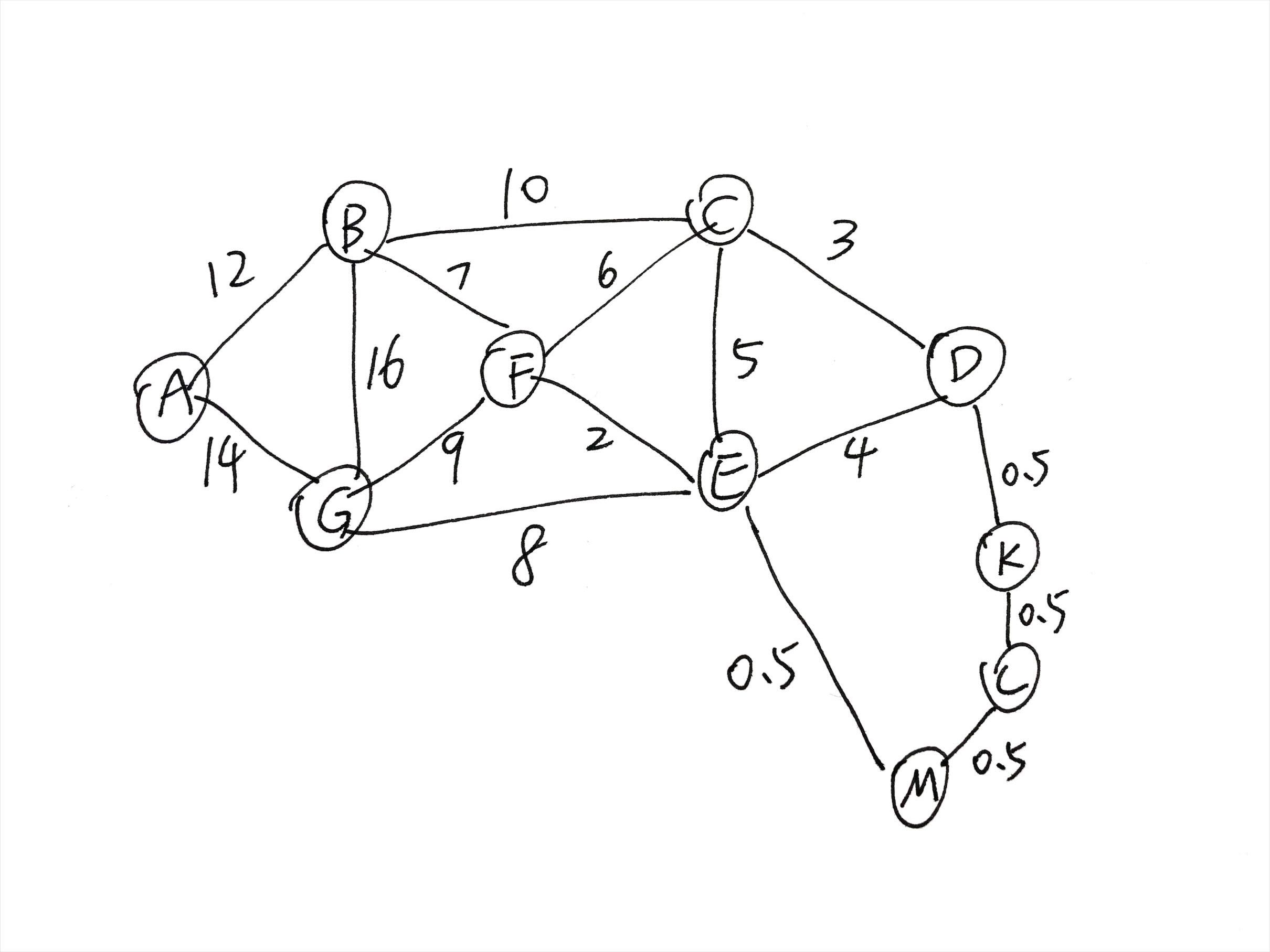
所以Dijkstra算法的另一个重点是“从集合Q中弹出拥有最小数值的节点”(所以集合Q一般采用priority queue来实现)
如果用纸笔去推上面这张图的时候就会发现,由于每次都要弹出最小数值的节点,所以前几步一直都在弹出K, L, M...直到这些步骤都完成后才把d[E]=2从集合Q中弹出来加入集合S.
所以另一个直观的看法就是,Dijkstra算法类似于从出发地点 灌水渗透/放一大堆蚂蚁,或者说,想象一下广度优先搜索的样子
邻接矩阵和邻接表
这两种数据结构的实现都忘记了,反正google搜Dijkstra算法永远能看到各大博客在对比这两种实现方式
看到有些网页说这两种存储方式仅仅是影响图模型的构建,还有的网页说这两种存储方式不仅影响图模型还影响Dijkstra算法本身
等待后续补充结论
现在学会的Dijkstra算法只能做这件事:已知出发点D和目标点E,求D到E的最短路径距离
还没有学会:如何在Dijkstra算法的步骤中保存(或像DP那样回溯)最短路径,如何重复利用最短路径的数据(涉及到很多agents同时搜索,是不是每个agent寻路的时候都要触发一次完整的Dijkstra算法)
不过好像上面写的“重复利用最短路径的数据“可能用不上太多,因为simulator的graph是动态的,道路的权重(拥堵)会随时变化,所以事先计算的东西起不了作用
现在只需要考虑“如何在Dijkstra算法的步骤中保存最短路径”这个问题即可
