 WARNING: This article may be obsolete
WARNING: This article may be obsoleteThis post was published in 2022-06-22. Obviously, expired content is less useful to users if it has already pasted its expiration date.
 This article is categorized as "Garbage" . It should NEVER be appeared in your search engine's results.
This article is categorized as "Garbage" . It should NEVER be appeared in your search engine's results.Table of Contents
本篇笔记总结
本篇写的很跳跃且很乱,主要学习了一个(实际上很简单的)Viterbi空间压缩优化算法;最后得出的结论见:文末。
继续学习Viterbi
首先还是复习一遍经典老题:🔗 [2022-01-18 - Truxton's blog] https://truxton2blog.com/2022-01-18/#隐马尔可夫-Viterbi
值得注意的是,这道题很容易犯错,看来还是不够熟练,需要每次都做一遍。
顺便搞点笔记:
接上面的PDF笔记可知,常规Viterbi所需要占用的空间为[mathjax]m \times n[/mathjax]. ([mathjax]m[/mathjax]为state数量,[mathjax]n[/mathjax]为时间)
更高效(节省空间)的改进型Viterbi算法
🔗 [[0704.0062] On-line Viterbi Algorithm and Its Relationship to Random Walks] https://arxiv.org/abs/0704.0062
本篇论文的主要作用在于:
1:压缩空间
2:on-line Streaming Viterbi:

这个总结很重要,为什么on-line viterbi不容易实现?因为(传统viterbi算法)越到后面,每新增一次observe数据,都要从头推算optimal path,这也就意味着程序需要存储全部路径!如果我们能找到很多「Coalescence point」,就能每次都从「Coalescence point」开始切片,这样就省去了大量存储空间和计算时间。
这是论文里的一张Viterbi表格图:
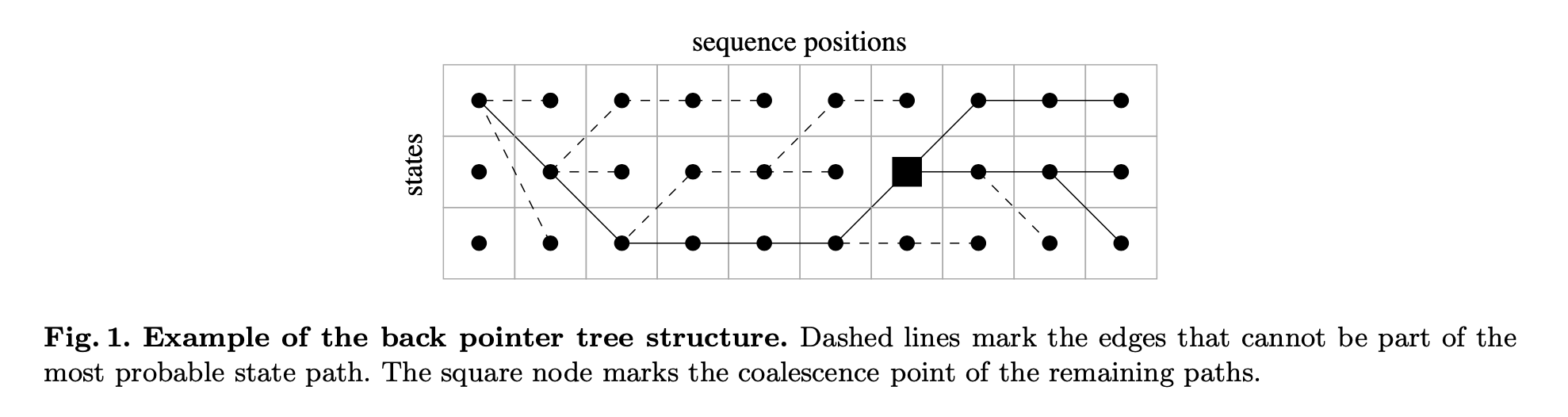
等等,仔细观察上面这张图:这张图里的「虚线」是不是少画了几条?并没有。重复Viterbi graph的特质:“每个子节点都必须指向唯一的1个父节点”,所以虚线并没有少画!
先做一点预先笔记:
但是上面这条笔记和论文里的内容还不一样,论文里的discard更狠,但是需要找出一个「Coalescence point」.
等等,有一篇更老的论文讲述这个,见:🔗 [viterbi_algorithm.pdf] https://www2.isye.gatech.edu/~yxie77/ece587/viterbi_algorithm.pdf
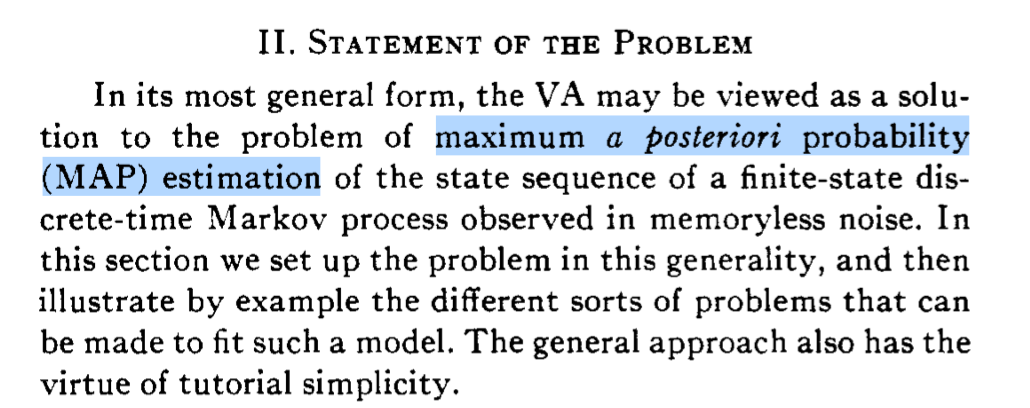
是的!首先,由过去的笔记可知,Viterbi Algorithm本质上是一个MAP算法。
前置知识:K-best Viterbi Algorithm
来自:🔗 [thesis.pdf] https://uwspace.uwaterloo.ca/bitstream/handle/10012/4603/thesis.pdf
可以参考:🔗 [解码算法:N-best viterbi - 知乎] https://zhuanlan.zhihu.com/p/83525045
再等等,本篇笔记最开始的论文 🔗 [On-line Viterbi Algorithm and Its Relationship to Random Walks] 就是为了找那个「Coalescence point」的,暂时不需要其他论文的算法,还是先看完这篇论文吧。
有点难理解,还是再看看[The Viterbi Algorithm]吧。
注明:下面这个网页没啥新鲜的东西,反而多了一些奇怪疑惑的内容。
再找到一个教学网页:🔗 [Title Page] http://www.cim.mcgill.ca/~latorres/Viterbi/va_title.htm
首先就遇到了一个非常令人疑惑的东西:
临时查阅了这个概率论复习PPT:🔗 [§1.5 条件概率] https://web.xidian.edu.cn/lnzhu/files/20180912_200706.pdf
由于上面那个网页没什么用,现在重新回到资料[2]:
先放一个资料在这里,以后有机会再看:
🔗 [beam search 和viterbi对比] https://puluwen.github.io/2019/01/beam-search-vs-viterbi/
下面2张图来自李宏毅2020语音识别课程:(从p3第28分钟开始:🔗 [[DLHLP 2020] 李宏毅老师2020春课程-语音识别-语音合成-语音分离_哔哩哔哩_bilibili] https://www.bilibili.com/video/BV1hZ4y1w7j1?p=3)(另:对这门课的入门部分总结博客可以看这里)
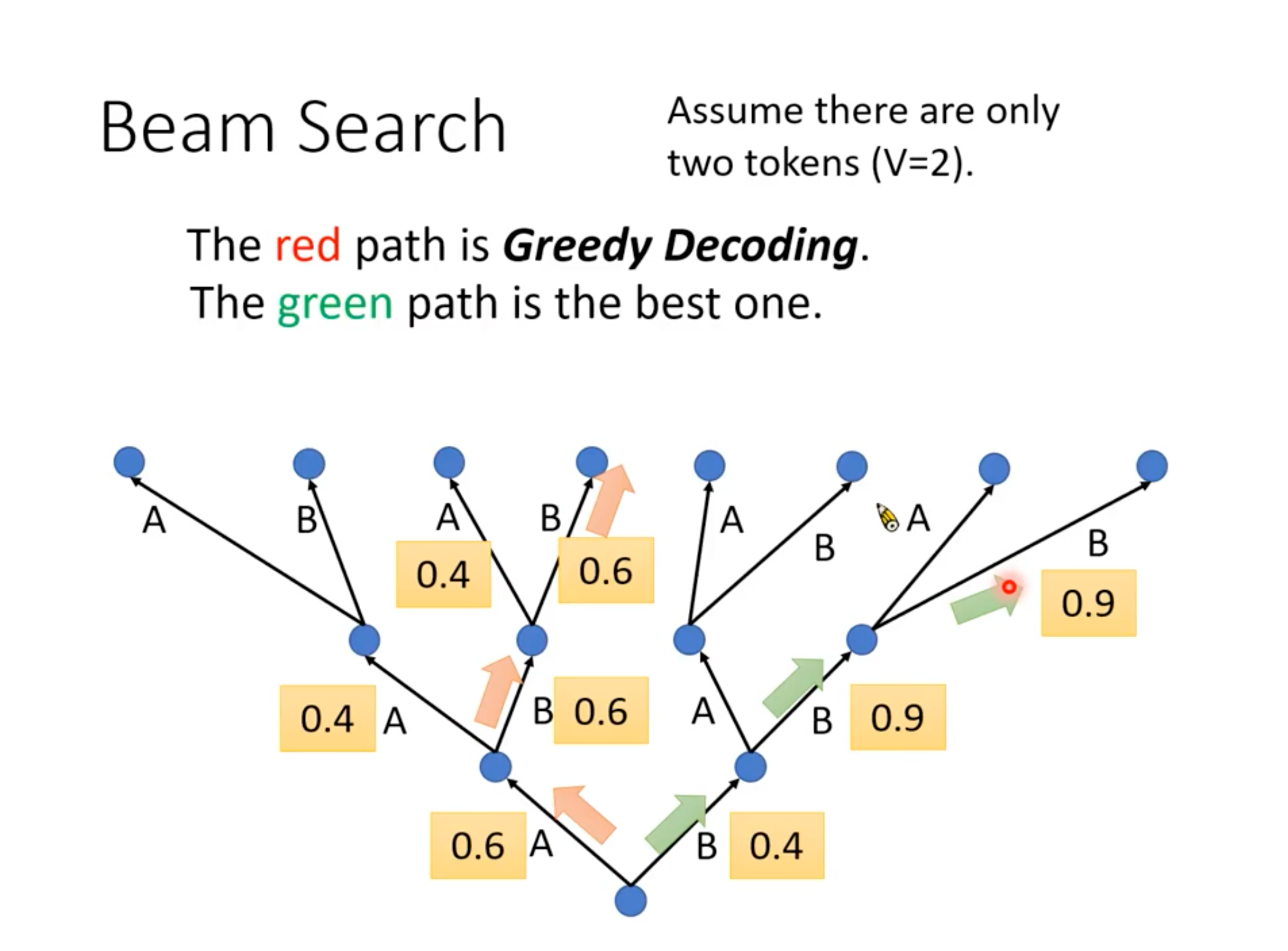
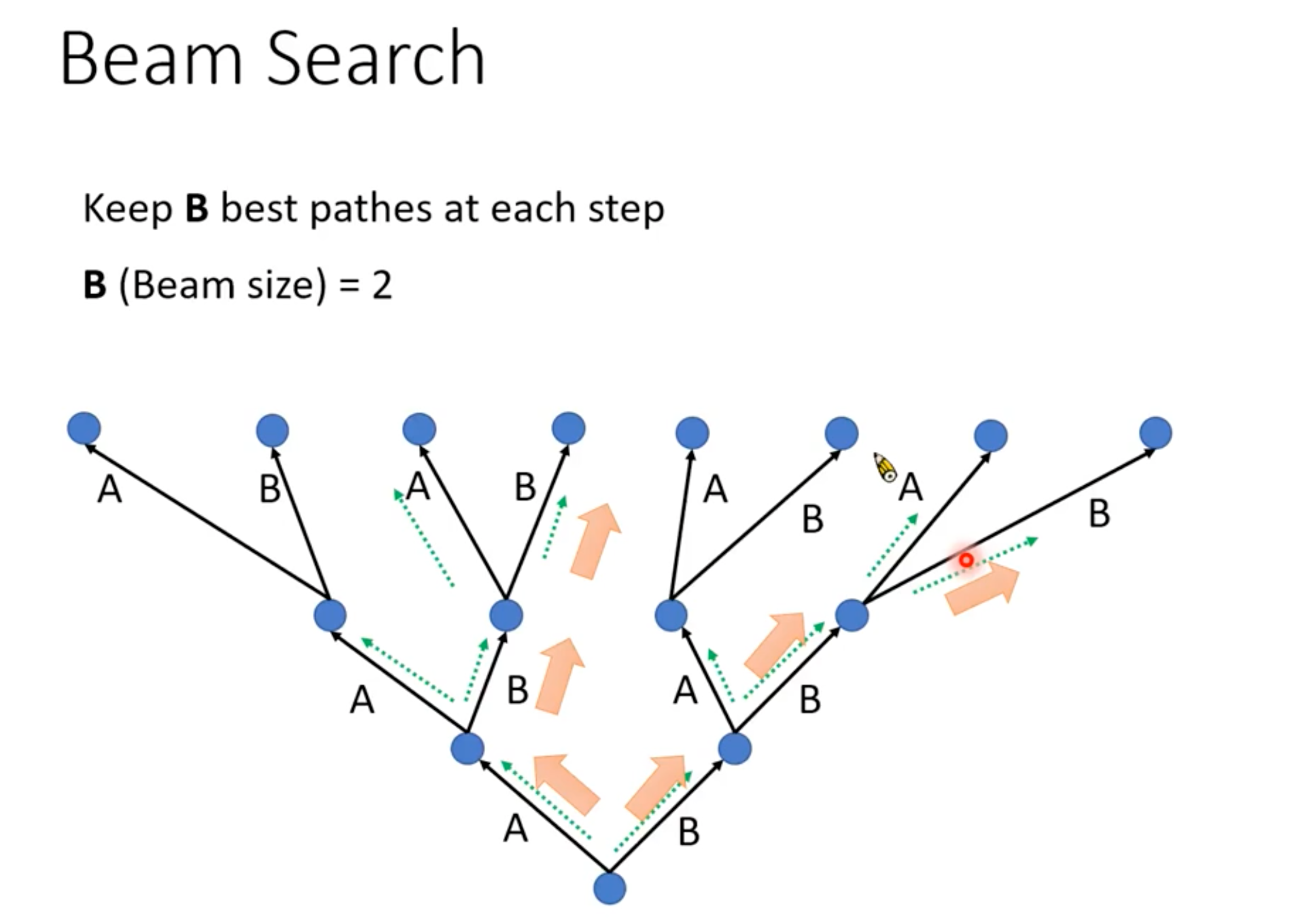
可以看到,beam search和k-best Viterbi有一点...相似。
那么beam search和k-best Viterbi到底有什么区别呢?还是说它们就是同一个算法?
等等!在搜寻资料的过程中又发现了「A* 搜索算法」,见: 🔗 [A*搜尋演算法 - 维基百科,自由的百科全书] https://zh.wikipedia.org/wiki/A*搜尋演算法 ,以及这个解释得更清楚的博客:🔗 [A*搜索 · ACM Book] https://hrbust-acm-team.gitbooks.io/acm-book/content/search/a_star_search.html
资料1:🔗 [ACL12_decoding.pdf] http://www.yichang-cs.com/yahoo/ACL12_decoding.pdf
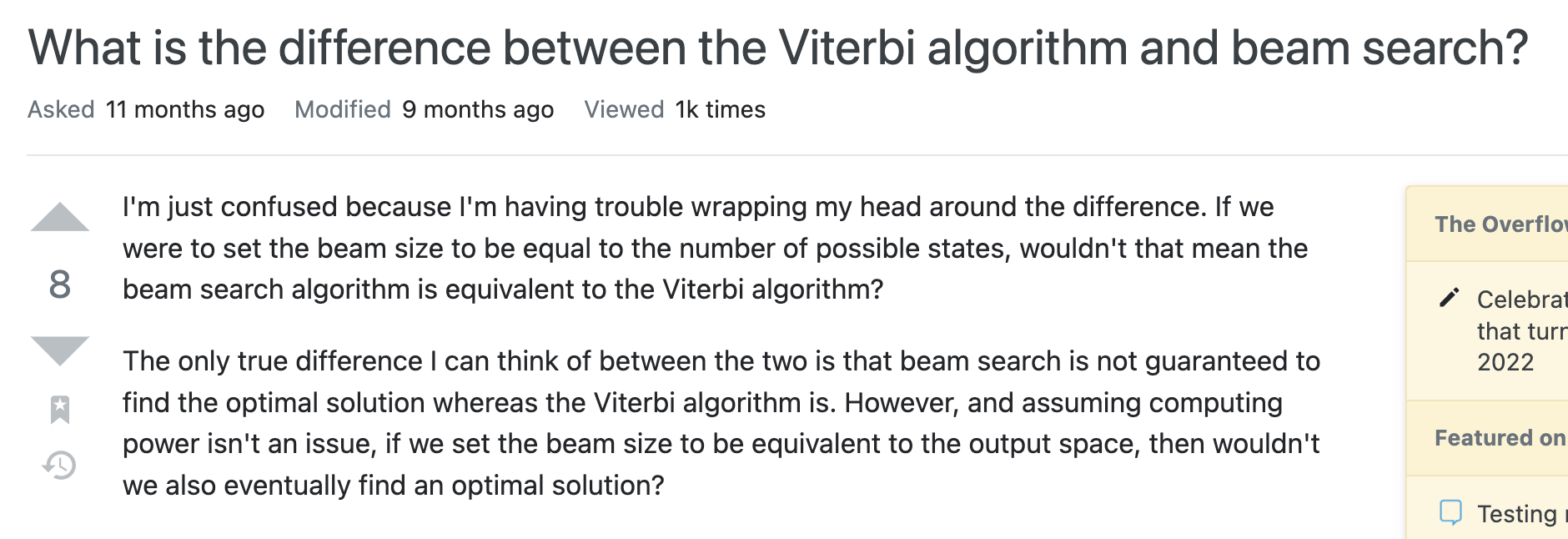
资料2:🔗 [natural language - What is the difference between the Viterbi algorithm and beam search? - Cross Validated] https://stats.stackexchange.com/questions/536249/what-is-the-difference-between-the-viterbi-algorithm-and-beam-search
来自资料2的结论:是的,如果算力足够,把beam search的存储空间设置为HMM state space,那么它们两者是一样的。
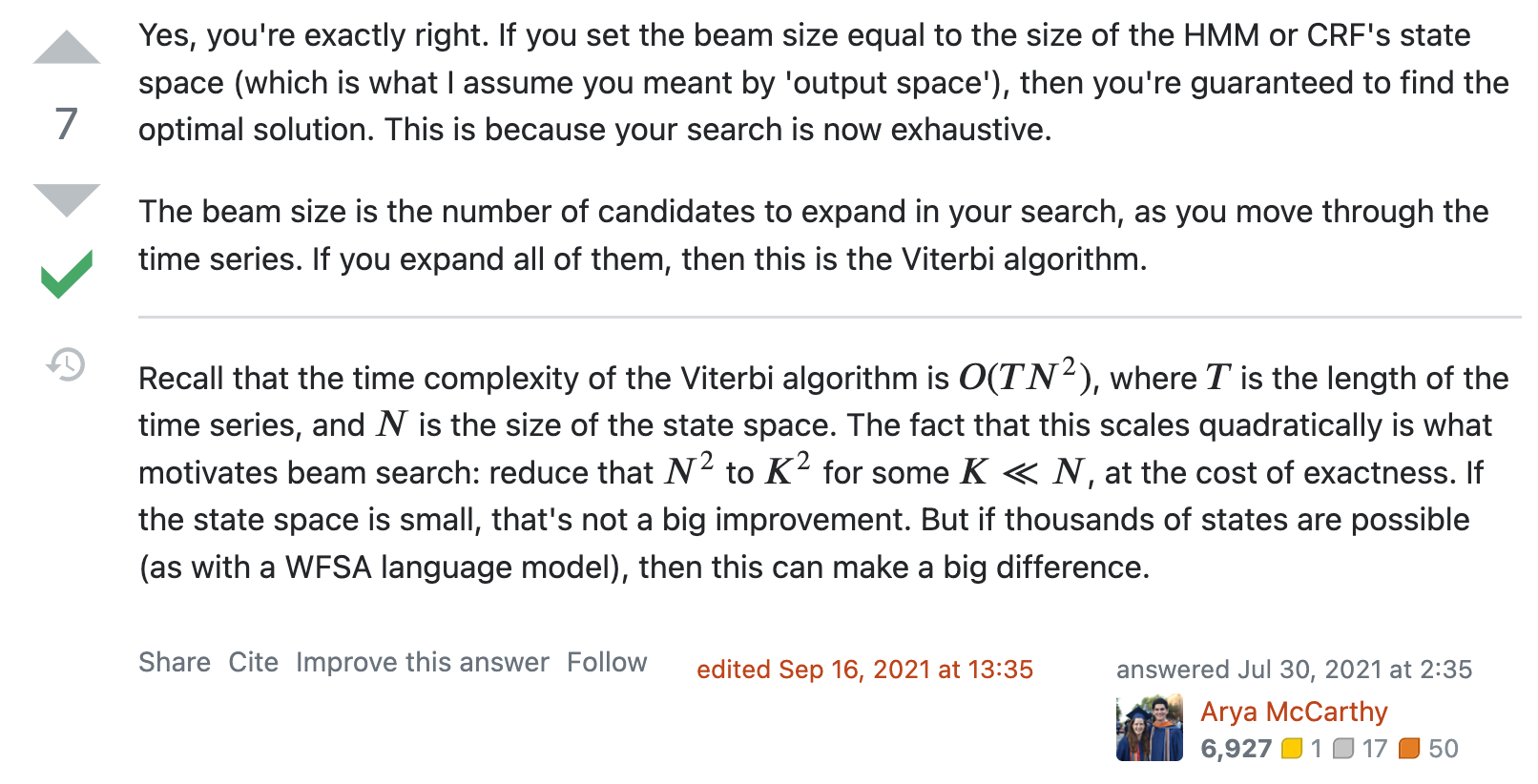
这也印证了下面的结论:

seq2seq的简单介绍
这篇文章非常容易理解:🔗 [一文看懂 NLP 里的模型框架 Encoder-Decoder 和 Seq2Seq] https://easyai.tech/ai-definition/encoder-decoder-seq2seq/
浏览资料有点偏离大主题了,现在重新回到重点:「如何寻找那个Coalescence point」?
不妙,我好像想太多了,「Coalescence point」是不是可以直接判断出来?如果某个时间点上的所有节点都指向同一个父节点,那么就可以删掉父节点之前的存储空间,从父节点开始计算...至于Coalescence point到底有多大几率出现,那就是另一个问题了,但至少我们简化了很多东西!
所以现在的算法就变成了这个样子:
- 首先执行一个最常规的Viterbi算法;
- 算法进行过程中突然发现:时间[mathjax]t[/mathjax]里的所有节点都指向同一个父节点(把这个父节点称为 Coalescence point );
- 把[mathjax]t-1[/mathjax]之前的所有Viterbi graph全部丢弃,继续进行Viterbi算法;
- 其余内容保持不变,但整个过程大大节省了存储空间和back tracking消耗的时间。 Coalescence point 找的越多就越节省空间和时间。
所有阅读过的资料
[1] On-line Viterbi Algorithm and Its Relationship to Random Walks: https://arxiv.org/abs/0704.0062
[2] The Viterbi Algorithm: https://www2.isye.gatech.edu/~yxie77/ece587/viterbi_algorithm.pdf
[3] Viterbi Algorithm in Text Recognition: http://www.cim.mcgill.ca/~latorres/Viterbi/va_title.htm
